



















ROS2与OpenManipulator-X入门教程#humble版#-GUI界面控制
文章说明
- 本教程主要介绍如何在Humble版本下使用gui界面控制omx机械臂
操作步骤
- 启动机械臂
# 使用U2D2作为驱动板
$ ros2 launch open_manipulator_x_bringup hardware.launch.py
# 使用openCR作为驱动板
$ ros2 launch open_manipulator_x_bringup hardware.launch.py port_name:=/dev/ttyACM0
- 启动moveit配置
$ ros2 launch open_manipulator_x_moveit_config moveit_core.launch.py
- 启动gui界面控制
$ ros2 launch open_manipulator_x_gui open_manipulator_x_gui.launch.py

GUi界面的使用
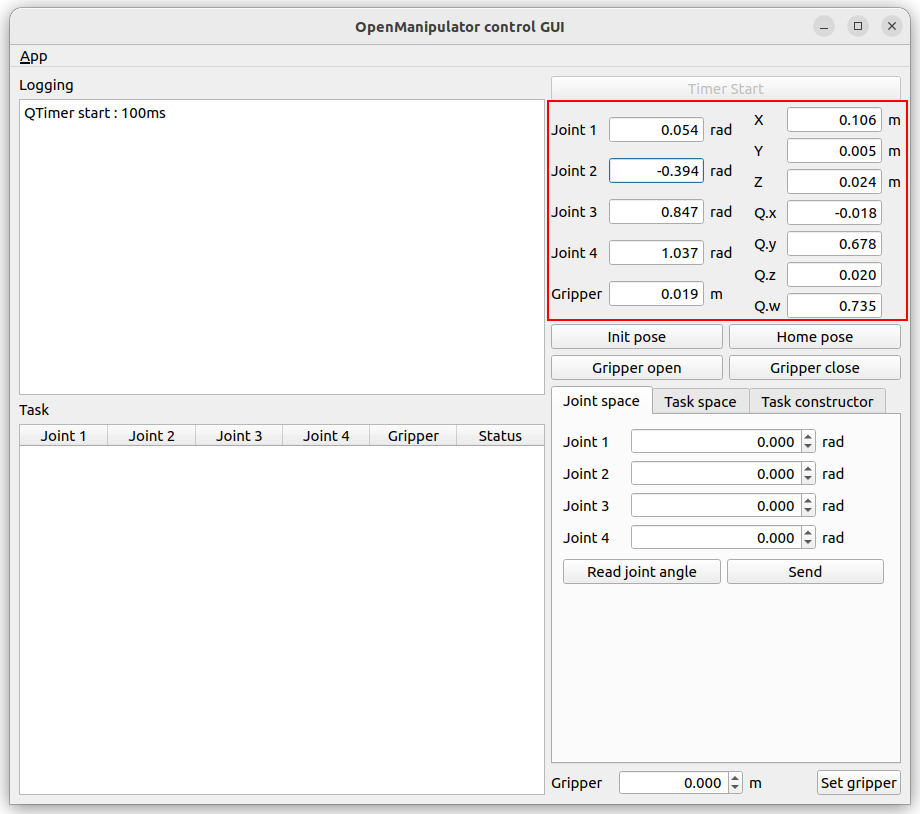
- 启动后,首先点击
Timer Start按钮
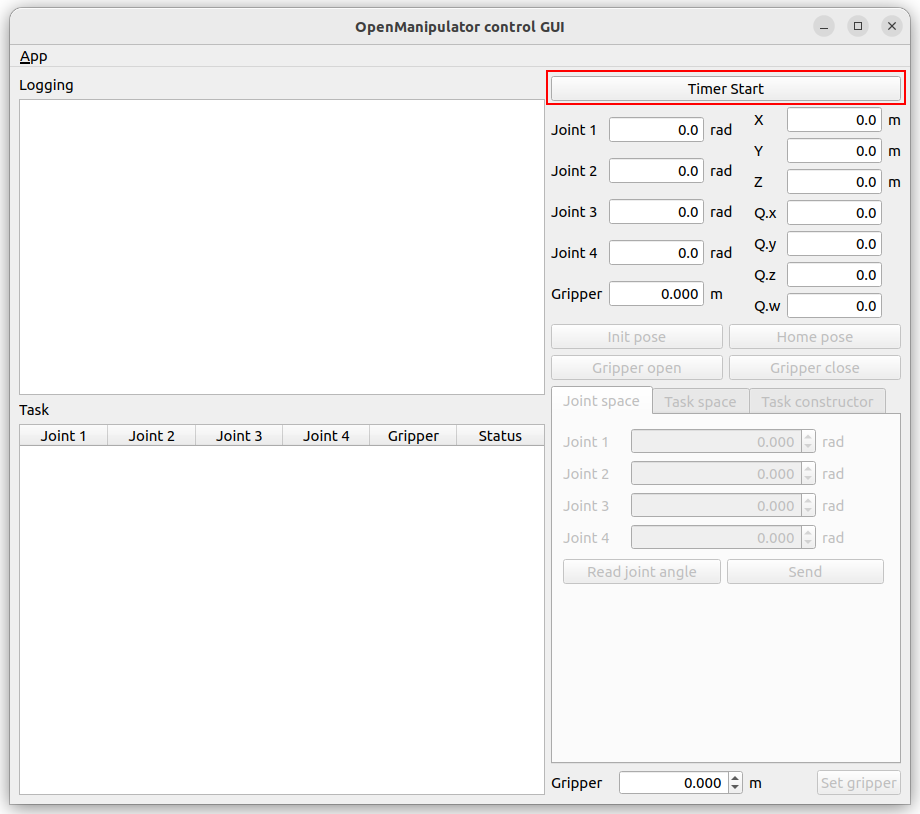
- 检查机械臂的状态是否正常
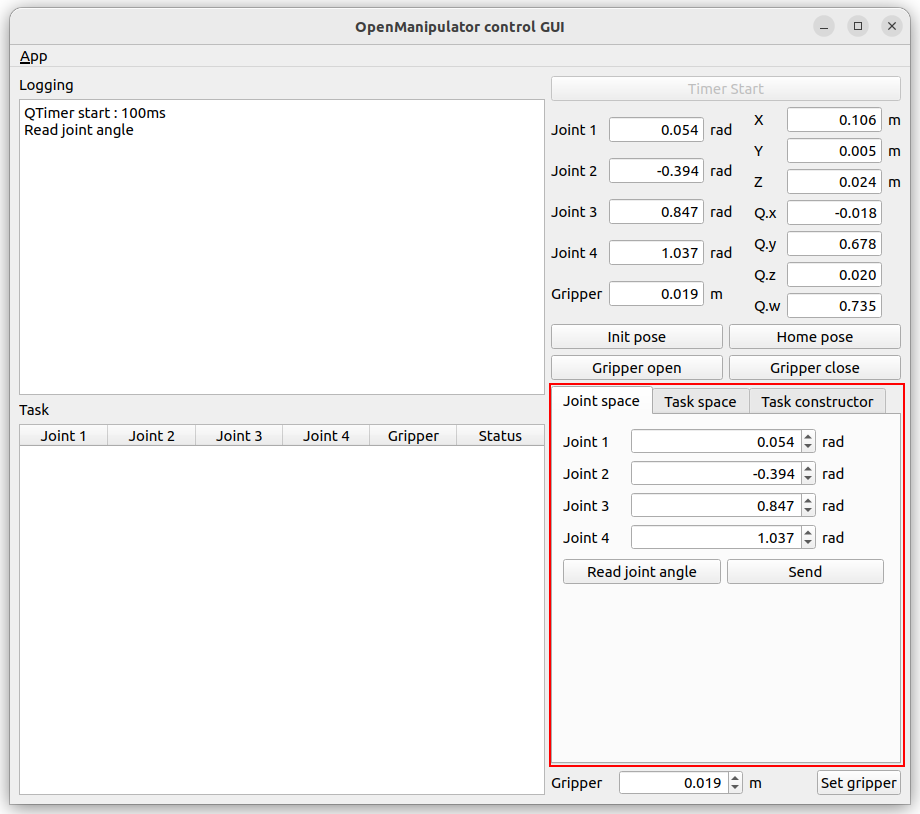
- 在
Joint space界面下输入各个关节的角度,然后按Send执行
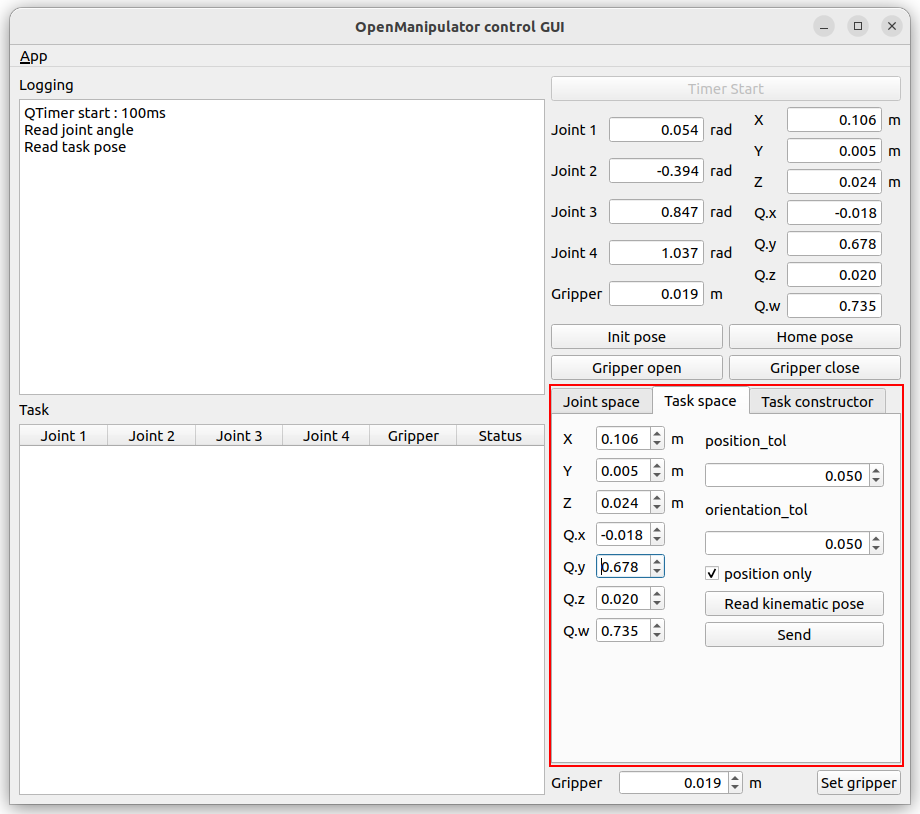
- 在
Task space界面下输入末端执行器(end-effector)的坐标,再点击send执行
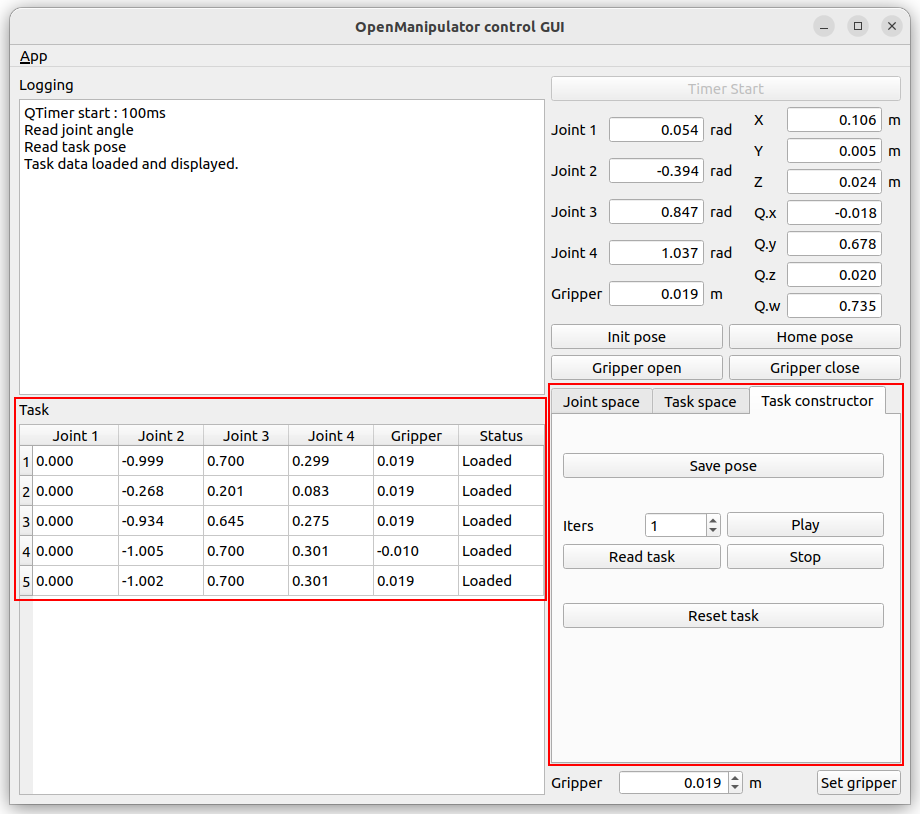
- 在
Task constructor界面,点击Read task按钮开始计划任务 - 点击
Save pose按钮保存当前机械臂的位姿,在右侧的列表可以查看已记录的坐标位置
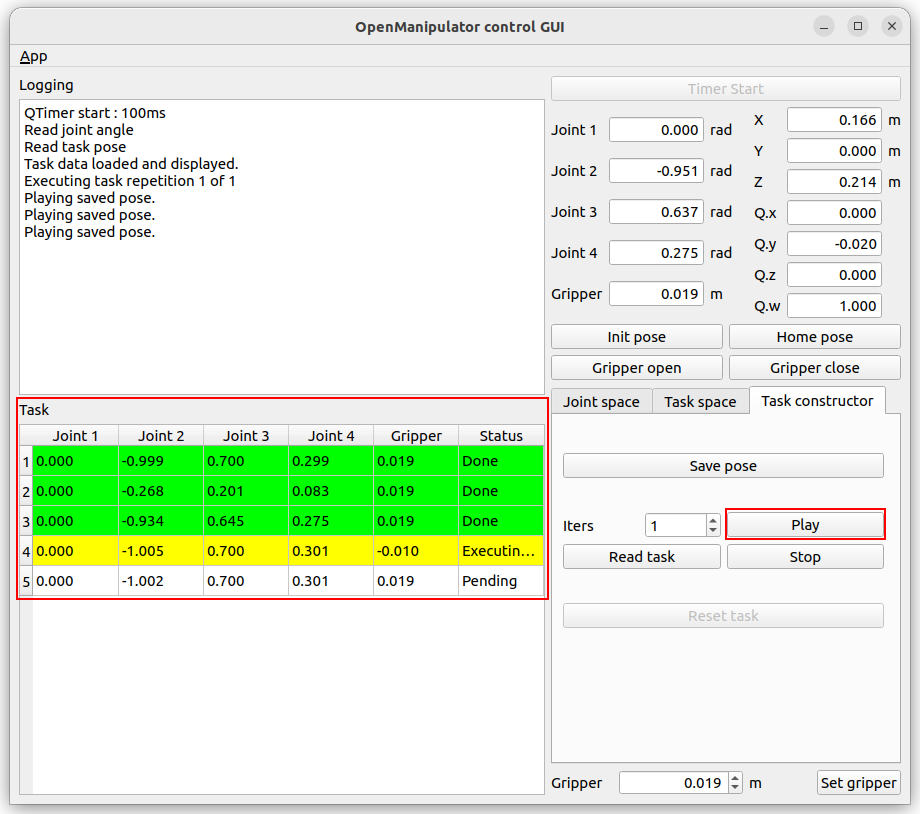
- 点击
Play按钮,机械臂将会按照已保存的任务顺序来移动 Iters表示执行次数- 左侧
Task界面中的Status列将会实时显示当前的任务状态
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号