



















walking云台入门教程-颜色识别追踪例程
文章说明
- 本教程主要介绍如何使用walking云台来进行颜色识别追踪例程
- 进行颜色识别追踪例程前,需要进行过滤指定颜色标定操作
- 测试环境:
walking-gb2l云台+罗技C920相机
前提准备
- 若相机使用中发现镜头畸变严重,应使用进行
camera_calibration包进行标定
标定步骤
- 启动USB摄像头
$ ros2 launch walking_turret usb_cam.launch.py resolution:=320x240
- 启动颜色标定程序
$ ros2 launch walking_turret example_color_detect_calibrator.launch.py
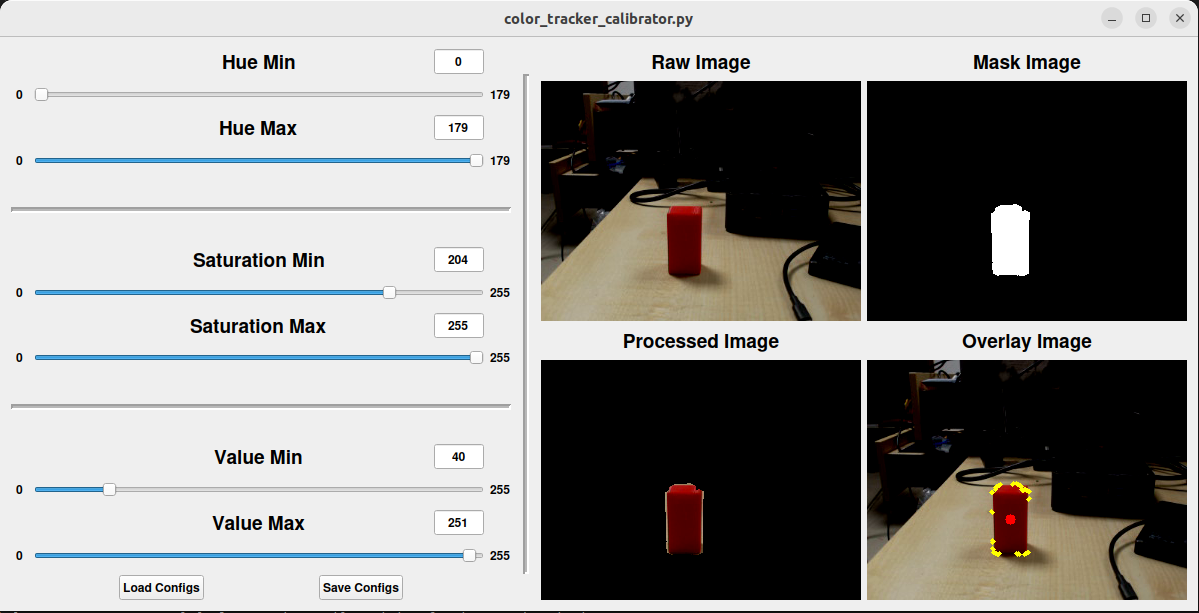
调整参数,过滤颜色
调整完成后,需要覆盖配置文件到
walking_turret/config/color_filter_hsv.csv上关闭所有终端
测试步骤
- 启动云台
$ ros2 launch walking_turret turret.launch.py
- 启动USB摄像头
$ ros2 launch walking_turret usb_cam.launch.py resolution:=320x240
- 启动颜色识别追踪程序
$ ros2 launch walking_turret example_color_tracker.launch.py
演示视频
颜色标定
测试
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号