



















walking机器人入门教程-通过web界面来开启服务
说明
- 介绍如何通过web界面来开启服务
- 可以启动底盘,启动web-brigde等,摆脱以前的进行系统,使用命令来启动服务,简化开启步骤。
- 支持的版本: humble版本
访问服务页面
- 首先要能连接的小车的热点,参考教程
或者通过机器人显示屏界面来连接局域网wifi
- 通过web配置wifi
手机和笔记本连上热点后,访问网站http://192.168.12.1:5050 或 使用局域网的IP:5050
选择服务配置, 效果图
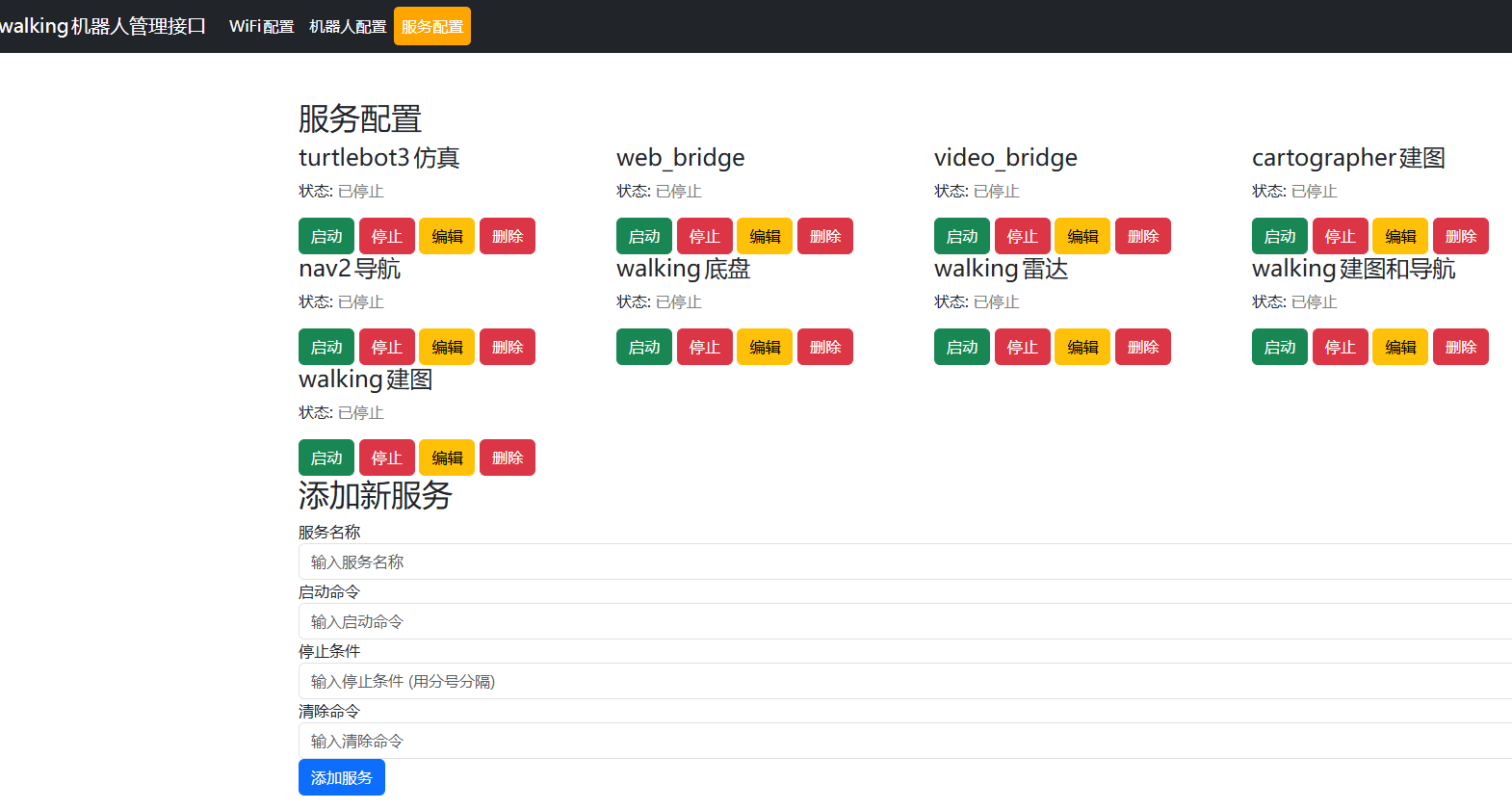
- 可以进行服务管理
- 添加新的服务
- 对服务进行启动,停止,编辑和删除
基础移动
- 启动web_bridge和 walking底盘
- 利用walking_flutter的任意版本,连接机器人
- 进入操作界面,点击遥控图标,显示虚拟摇杆,即可控制摇杆来控制小车
移动建图
- 进入服务管理页面,继续启动walking建图
- 再回到操作界面,即可显示地图
- 通过控制摇杆,让机器人到处移动实现建图
自主导航
- 再进入服务管理页面,继续启动walking导航
- 再回到操作界面,点击水滴图标,进入编辑航点状态,再现有地图指定目标点
- 在点击水滴图标,进入航点导航状态,通过点击目标点即可实现导航
- 在导航过程中,同时也继续建图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号