



















ROS2与Interbotix系列机械臂教程-moveit控制
文章说明
- 本教程主要介绍如何在ros2环境下使用moveit控制机械臂
操作步骤
- 假设正在现实中使用WidowX-250s机械臂,运行该命令
$ ros2 launch interbotix_xsarm_moveit xsarm_moveit.launch.py robot_model:=wx250s hardware_type:=actual
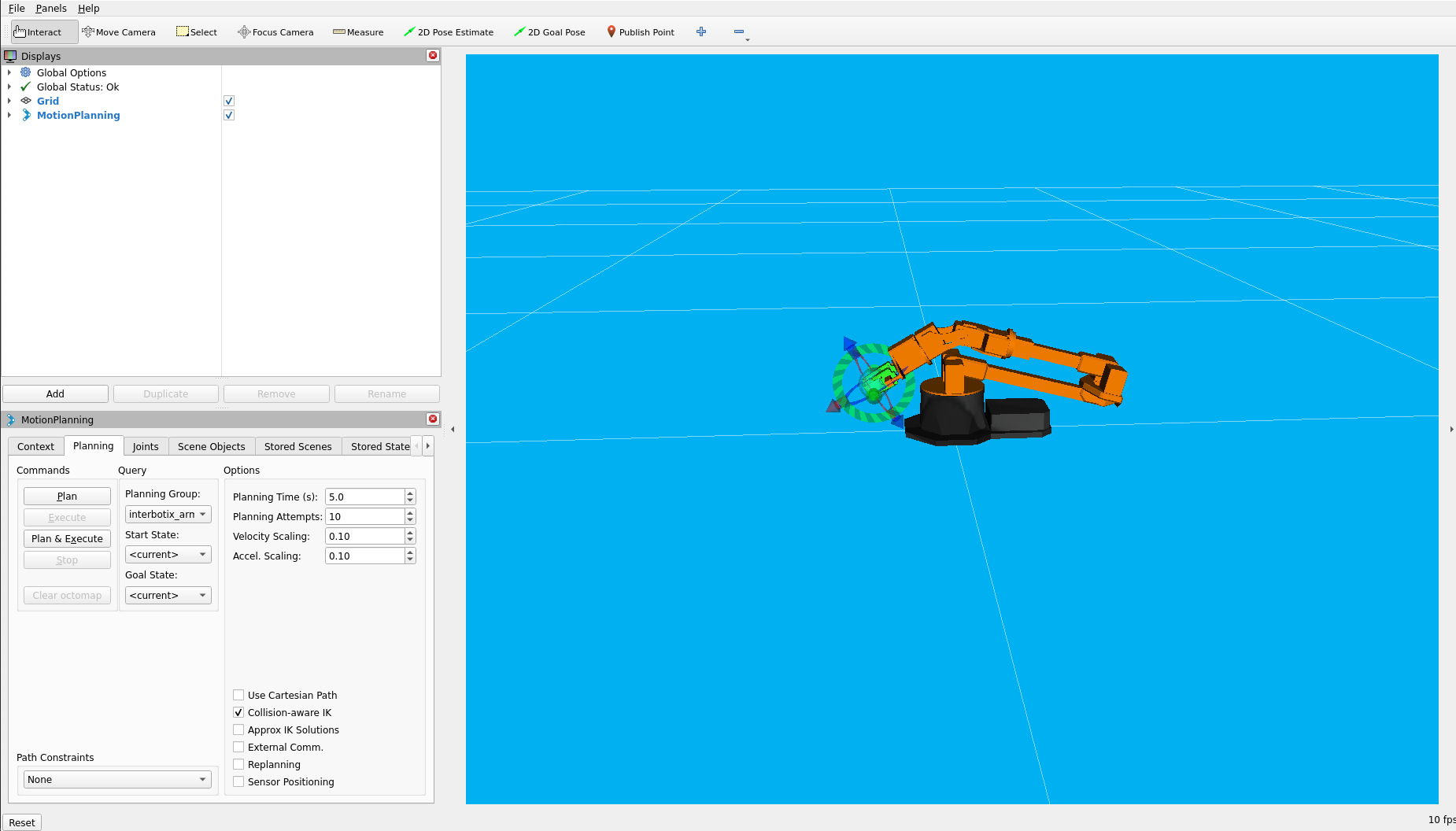
- 启动程序后,机械臂会调整到
sleep姿态,同时实时姿态会显示在RViz中
- 假设正在
gazebo中使用WidowX-250s机械臂,运行该命令
$ ros2 launch interbotix_xsarm_moveit xsarm_moveit.launch.py robot_model:=wx250s hardware_type:=gz_classic
- 假设正在
moveit模拟环境中使用WidowX-250s机械臂,运行该命令
$ ros2 launch interbotix_xsarm_moveit xsarm_moveit.launch.py robot_model:=wx250s hardware_type:=fake
- 如想了解更多launch文件的其他参数,请参阅下表
| Argument | Description | Default | Choices |
|---|---|---|---|
| robot_model | model type of the Interbotix Arm such as ‘wx200’ or ‘rx150’. | px100, px150, rx150, rx200, wx200, wx250, wx250s, vx250, vx300, vx300s, mobile_px100, mobile_wx200, mobile_wx250s |
|
| robot_name | name of the robot (typically equal to robot_model, but could be anything). |
LaunchConfig(robot_model) |
|
| external_srdf_loc | the file path to the custom semantic description file that you would like to include in the Interbotix robot’s semantic description. | ‘’ | |
| mode_configs | the file path to the ‘mode config’ YAML file. | LocalVar(‘FindPackageShare(pkg= interbotix_xsarm_moveit) + ‘config’ + ‘modes.yaml’’) |
|
| use_moveit_rviz | launches RViz with MoveIt’s RViz configuration. | true |
true, false |
| rviz_frame | defines the fixed frame parameter in RViz. Note that if use_world_frame is false, this parameter should be changed to a frame that exists. |
world |
|
| rviz_config_file | file path to the config file RViz should load. | LocalVar(‘FindPackageShare(pkg= interbotix_xsarm_moveit) + ‘rviz’ + ‘xsarm_moveit.rviz’’) |
|
| world_filepath | the file path to the Gazebo ‘world’ file to load. | LocalVar(‘FindPackageShare(pkg= interbotix_common_sim) + ‘worlds’ + ‘interbotix.world’’) |
|
| use_sim_time | tells ROS nodes asking for time to get the Gazebo-published simulation time, published over the ROS topic /clock; this value is automatically set to true if using Gazebo hardware. |
false |
true, false |
| base_link_frame | name of the ‘root’ link on the arm; typically base_link, but can be changed if attaching the arm to a mobile base that already has a base_link frame. |
base_link |
|
| use_gripper | if true, the default gripper is included in the robot_description parameter; if false, it is left out; set to false if not using the default gripper. |
true |
true, false |
| show_ar_tag | if true, the AR tag mount is included in the robot_description parameter; if false, it is left out; set to true if using the AR tag mount in your project. |
false |
true, false |
| show_gripper_bar | if true, the gripper_bar link is included in the robot_description parameter; if false, the gripper_bar and finger links are not loaded. Set to false if you have a custom gripper attachment. |
true |
true, false |
| show_gripper_fingers | if true, the gripper fingers are included in the robot_description parameter; if false, the gripper finger links are not loaded. Set to false if you have custom gripper fingers. |
true |
true, false |
| use_world_frame | set this to true if you would like to load a ‘world’ frame to the robot_description parameter which is located exactly at the ‘base_link’ frame of the robot; if using multiple robots or if you would like to attach the ‘base_link’ frame of the robot to a different frame, set this to false. |
true |
true, false |
| external_urdf_loc | the file path to the custom urdf.xacro file that you would like to include in the Interbotix robot’s urdf.xacro file. | ‘’ | |
| hardware_type | configures the robot_description parameter to use the actual hardware, fake hardware, or hardware simulated in Gazebo. |
actual |
actual, fake, gz_classic |
| robot_description | URDF of the robot; this is typically generated by the xacro command. | Command(FindExec(xacro) + ‘ ‘ + LocalVar(‘FindPackageShare(pkg= interbotix_xsarm_descriptions) + ‘urdf’ + LaunchConfig(robot_model)’) + ‘.urdf.xacro ‘ + ‘robot_name:=’ + LaunchConfig(robot_name) + ‘ ‘ + ‘base_link_frame:=’ + LaunchConfig(base_link_frame) + ‘ ‘ + ‘use_gripper:=’ + LaunchConfig(use_gripper) + ‘ ‘ + ‘show_ar_tag:=’ + LaunchConfig(show_ar_tag) + ‘ ‘ + ‘show_gripper_bar:=’ + LaunchConfig(show_gripper_bar) + ‘ ‘ + ‘show_gripper_fingers:=’ + LaunchConfig(show_gripper_fingers) + ‘ ‘ + ‘use_world_frame:=’ + LaunchConfig(use_world_frame) + ‘ ‘ + ‘external_urdf_loc:=’ + LaunchConfig(external_urdf_loc) + ‘ ‘ + ‘hardware_type:=’ + LaunchConfig(hardware_type) + ‘ ‘) |
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号