



















crazyflie入门教程-slam toolbox建图
说明:
- 介绍crazyflie结合光流和测距甲板,如何实现slam toolbox建图
相关设备:
- crazyflie套件:采购地址
步骤:
- 安装slam toolbox
sudo apt-get install ros-humble-slam-toolbox
- 修改crazyflie/config/crazyflie.yaml
cf231:
enabled: true
uri: radio://0/20/2M/E7E7E7E7E7
firmware_logging:
enabled: true
default_topics:
odom:
frequency: 10 # Hz
scan:
frequency: 10 # Hz
- 建图
ros2 launch crazyflie_examples multiranger_mapping_launch.py
- 运行键盘控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard
使用按键“t”起飞,
按键“b”降落,
按键“j”左转,
按键“l”右转,
按键“l”前进,
按键“,”后进,打开rviz
rviz2 -d ~/crazyflie.rviz
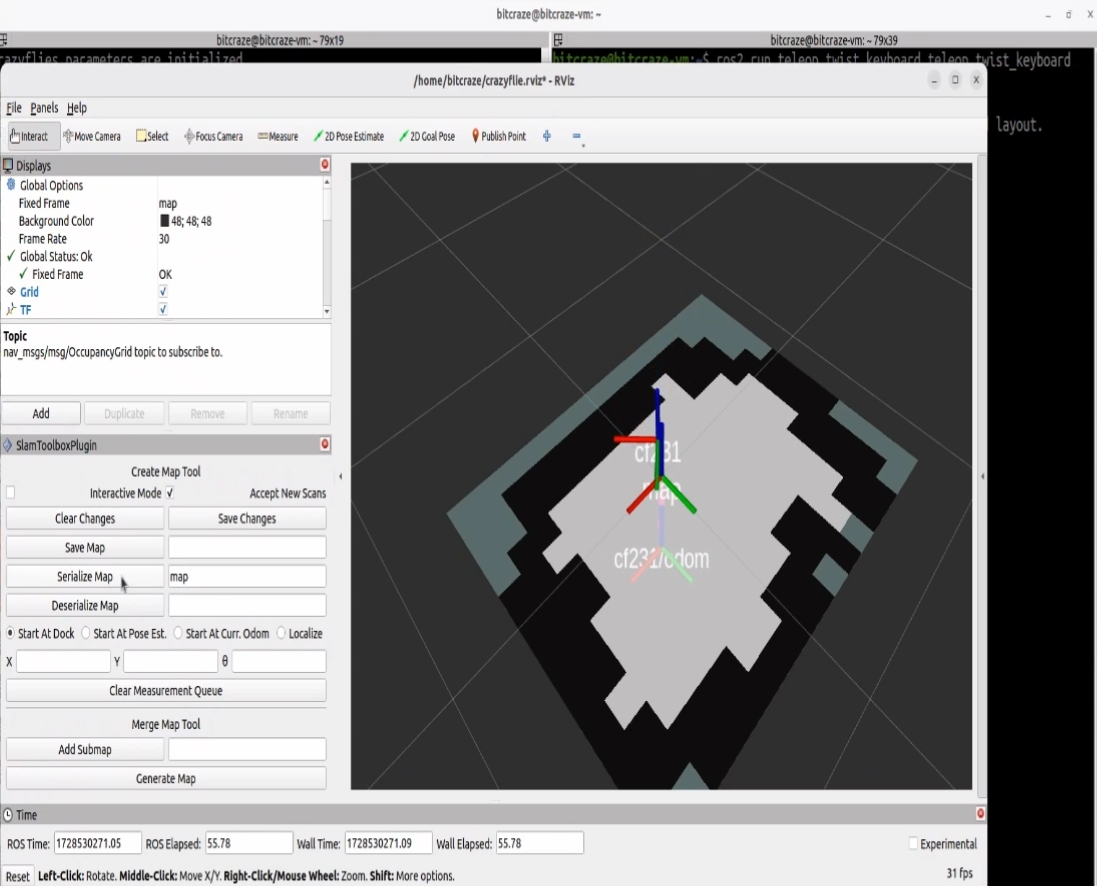
- 保存地图。在rviz菜单栏中,选择Panels,选择add new panel,选择SLAMToolboxPlugin,在Serialize Map后面的空格里填写文件的名称,点击Serialize Map保存地图,生成map.posegraph 和 map.data

演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号