



















ROS2与QT入门教程-利用QT-GUI控制turtlebot3仿真机器人
说明
- 介绍如何利用QT-GUI来控制turtlebot3仿真机器人
步骤
- 1.turtlebot3仿真机器人搭建,参考教程
利用RCM安装turtlebot3仿真环境
# 安装rcm
curl https://www.ncnynl.com/rcm.sh | bash -
# 安装turtlebot3 gazebo
rcm -s install_tb3_gazebo_source
- 2.启动turtlebot3仿真建图和导航,参考教程
#加载环境
. /usr/share/gazebo/setup.bash
#启动仿真
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
#启动建图
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
#启动导航
ros2 launch turtlebot3_navigation2 navigation2.launch.py
- 效果图
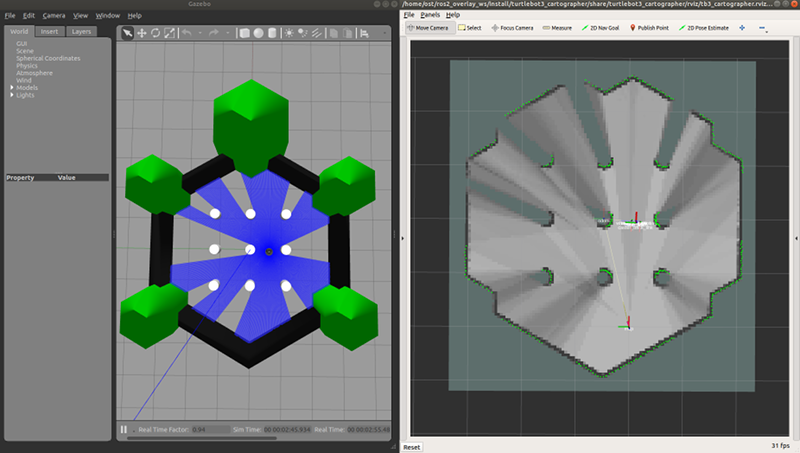
- 启动gui
cd ~/tools/Ros_Qt5_Gui_App/build
./ros_qt5_gui_app
- 可以在rviz上点击目标点,在gui上查看效果

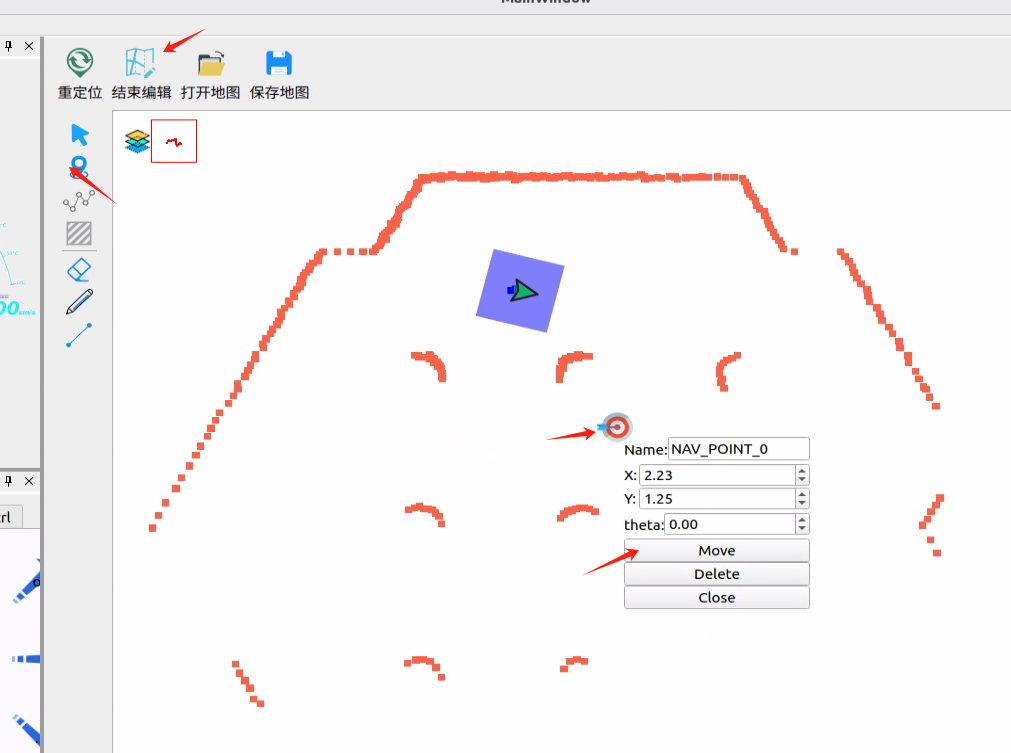
- 在gui上实现导航
- 点击编辑地图,再点击左边水滴地表,再地图任意位置点击即可部署坐标点,点击坐标显示框的move即可实现导航
- 效果图
- 效果图2
- 可拖动变更目标点
效果图

- 橡皮檫功能
效果图

- 画笔功能
效果图

10.线段绘制
效果图
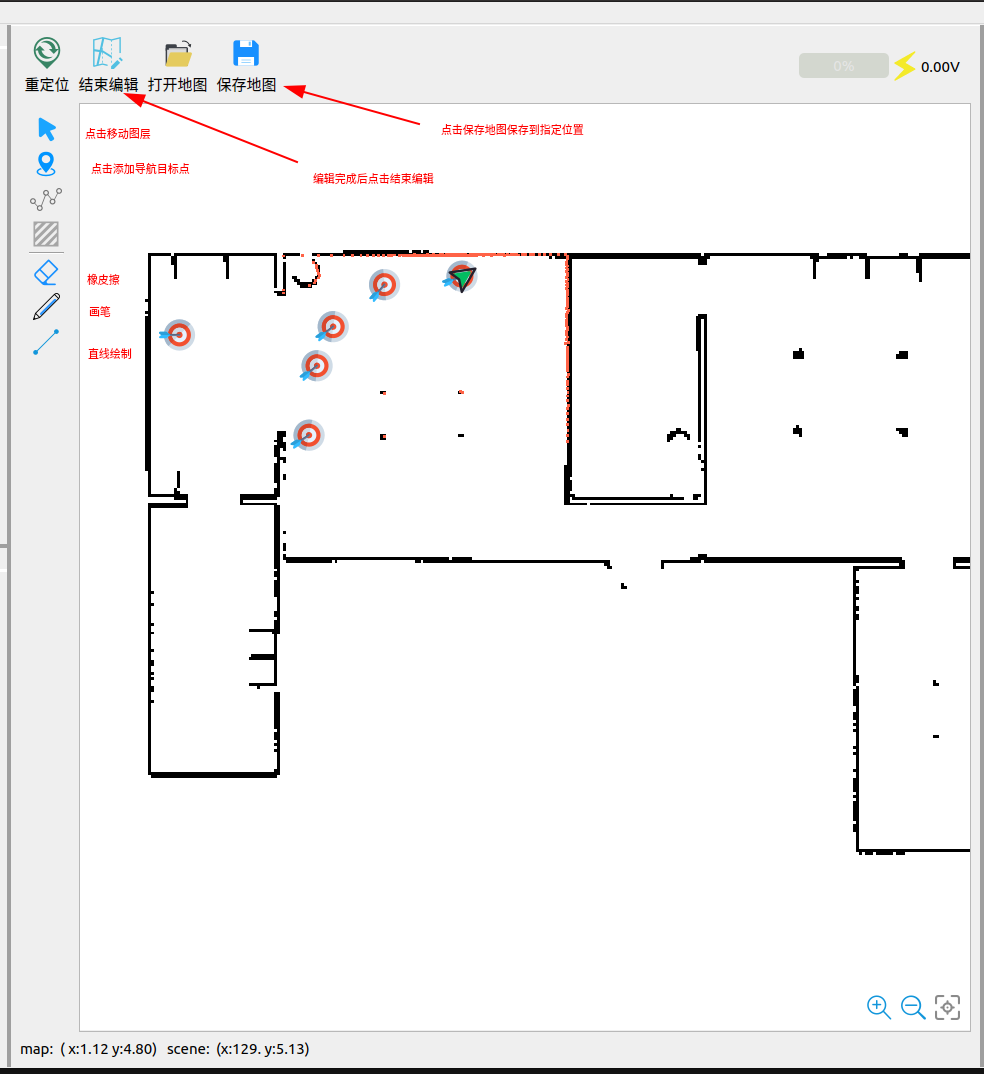
- 保持地图
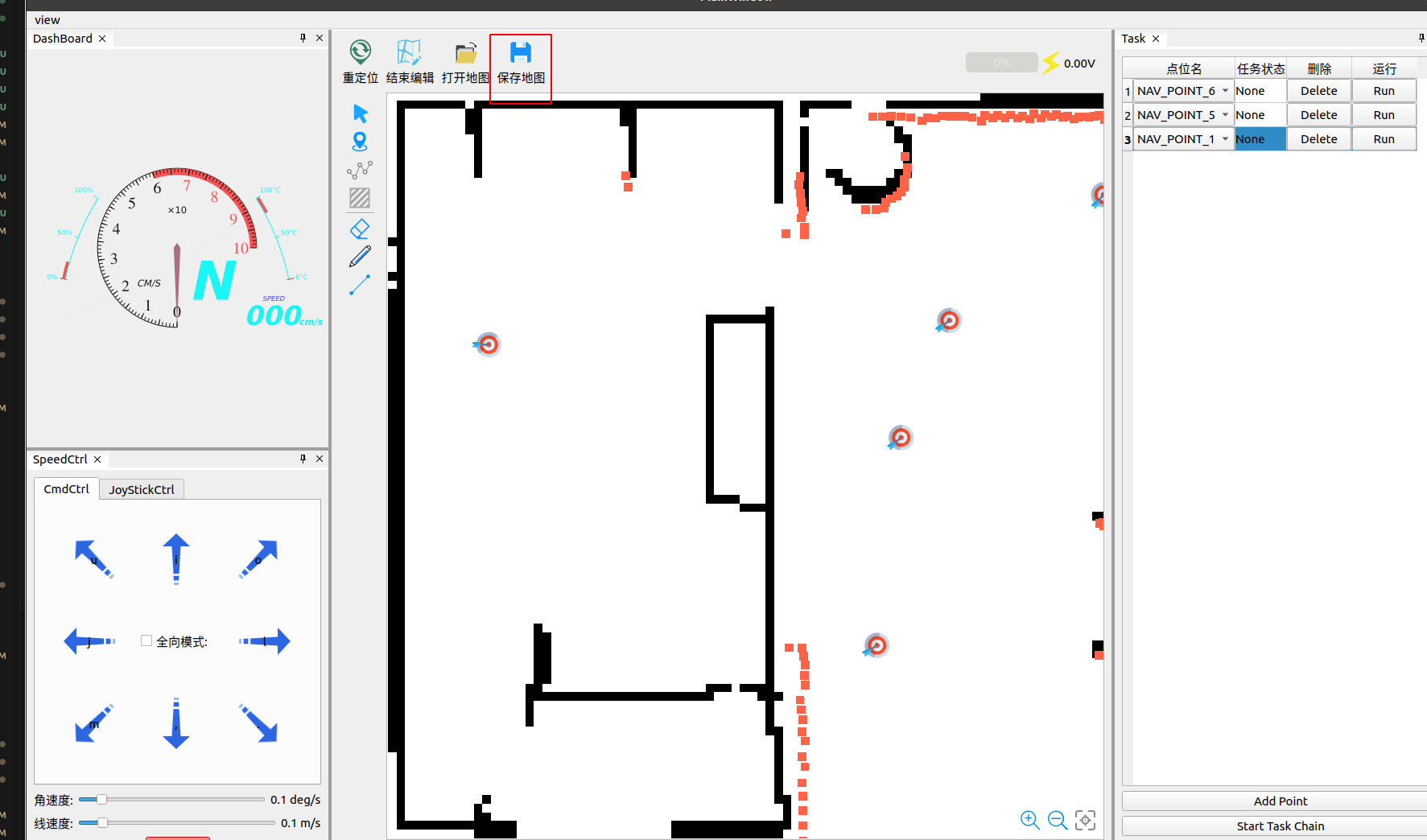
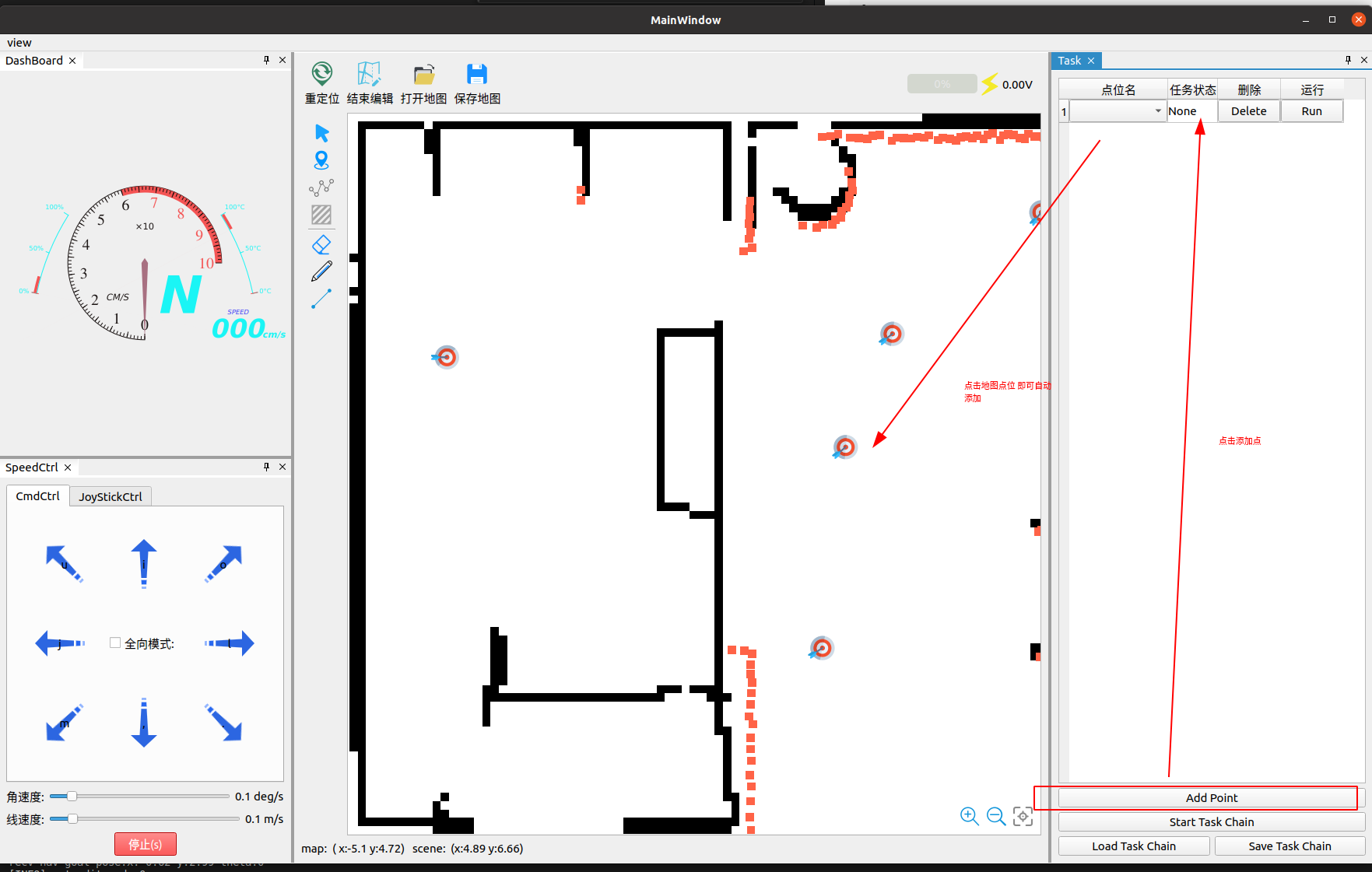
- 多点导航
效果图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号