



















Crazyflie入门教程-仿真-无人机结合光流和测距甲板做建图
介绍:
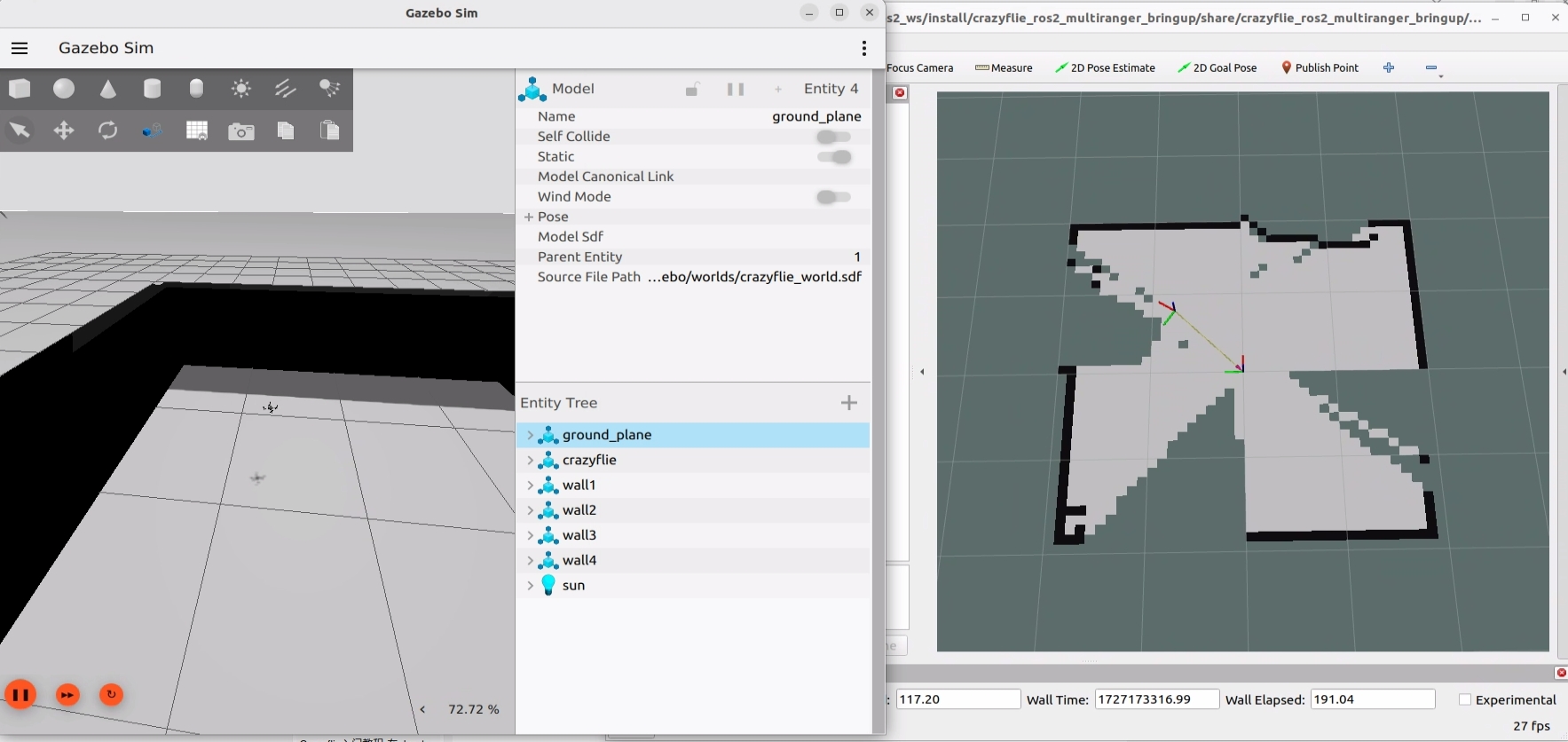
介绍如何在仿真环境下,无人机如何结合光流和测距甲板做建图
介绍如何在仿真环境下,无人机如何结合光流和测距甲板做沿墙建图
相关设备:
- crazyflie套件:采购地址
crazyflie在仿真环境下,使用键盘控制来建图
- 打开一个终端,启动仿真
source ~/crazyflie_mapping_demo/ros2_ws/install/setup.bash
export GZ_SIM_RESOURCE_PATH="/home/$USER/crazyflie_mapping_demo/simulation_ws/crazyflie-simulation/simulator_files/gazebo/"
ros2 launch crazyflie_ros2_multiranger_bringup simple_mapper_simulation.launch.py
- 打开另一个终端,运行环境并打开ROS2 teleop键盘控制
source /opt/ros/humble/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
- 使用键盘上的“t”键让 Crazyflie 起飞,使用键盘上的“u”键让 Crazyflie 降落,按照前后左右指令旋转无人机
crazyflie在仿真环境下,测试沿墙建图
- 运行仿真测试沿墙建图
ros2 launch crazyflie_ros2_multiranger_bringup wall_follower_mapper_simulation.launch.py
- 停止模拟Crazyflie
ros2 service call /crazyflie/stop_wall_following std_srvs/srv/Trigger
演示视频:在仿真环境下使用键盘控制来建图
演示视频:在仿真环境下沿墙建图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号