



















ROS2与Nav2应用opennav仿真教程-激光2D导航
说明
- 介绍如何通过激光数据进行2D导航
步骤
- 启动仿真
ros2 launch honeybee_bringup robot.launch.py use_simulation:=true use_sim_time:=true
- gazebo效果图

- 启动定位和导航
- 并指定之前保存的地图
ros2 launch honeybee_nav2 nav2.launch.py localization_type:=2D use_sim_time:=true map:=$HOME/experiment_files/map_1725188425.yaml
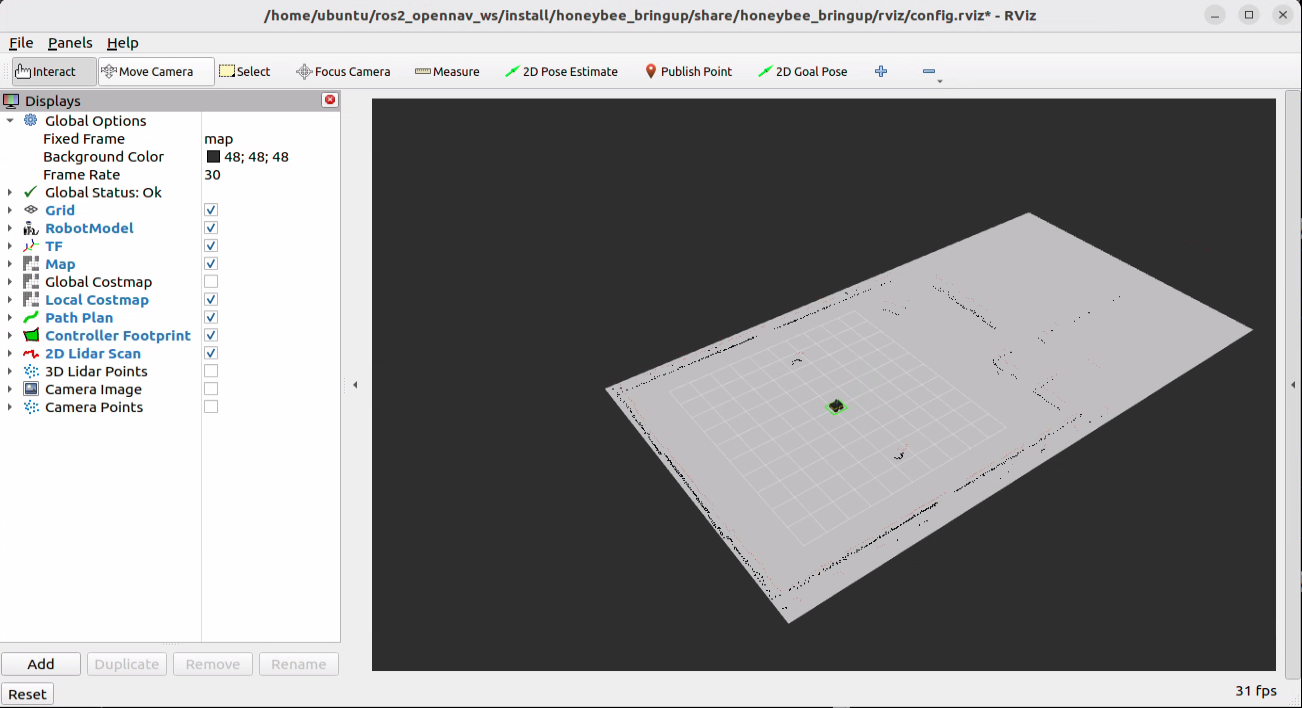
- 启动rviz
ros2 launch honeybee_nav2 rviz_2d_navigation.launch.py
- rviz效果图

通过rviz上的2D Pose Estimate按钮,指定小车位置,选择小车当前白色位置,向前拉出箭头就可以
rviz效果图
通过rviz上2D Gloal pose按钮,指定一个目标点,小车即可自动规划出路径并导航到目标点
rviz效果图

演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号