



















ROS2与Nav2应用opennav仿真教程-激光2D建图
说明
- 介绍如何使用激光数据进行2D建图
步骤
- 启动仿真
ros2 launch honeybee_bringup robot.launch.py use_simulation:=true use_sim_time:=true
- gazebo效果图

- 启动建图
ros2 launch honeybee_nav2 nav2.launch.py localization_type:=2D slam:=True use_sim_time:=true
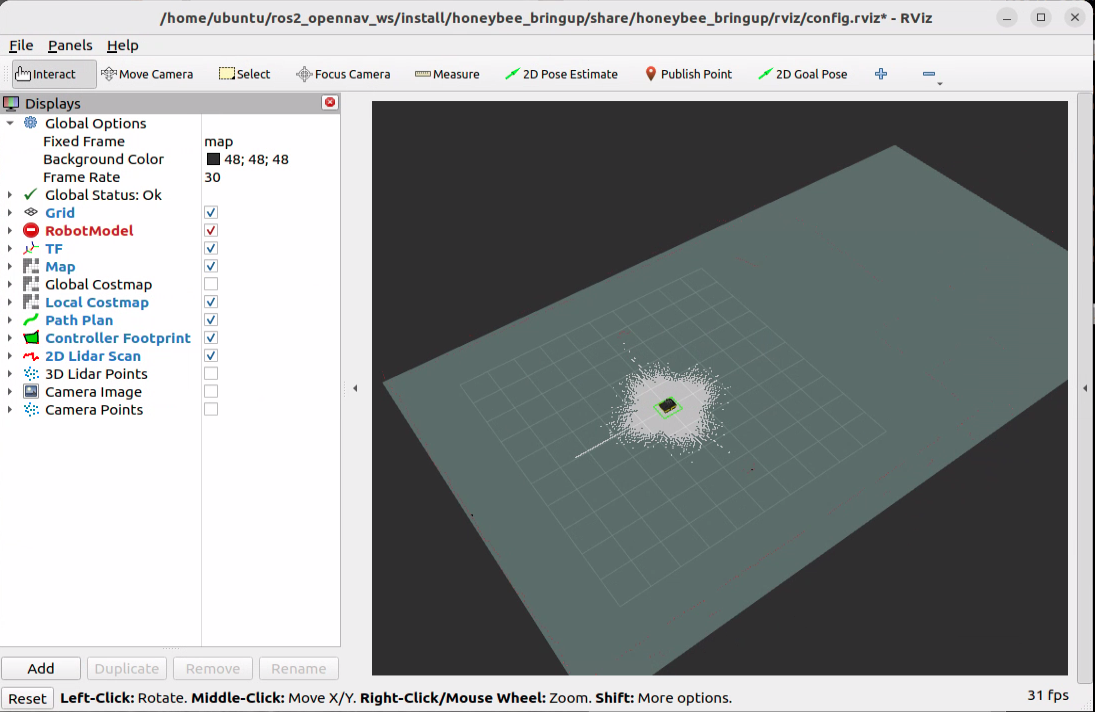
- 启动rviz
ros2 launch honeybee_nav2 rviz_2d_slam.launch.py
- rviz效果图
- 启动键盘控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard
- 效果图
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard
This node takes keypresses from the keyboard and publishes them
as Twist/TwistStamped messages. It works best with a US keyboard layout.
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.5 turn 1.0
- 通过键盘移动小车进行建图
- 保存地图
# 地图目录
mkdir -p $HOME/experiment_files
#保存地图
/home/ubuntu/ros2_opennav_ws/src/nav2_opennav/opennav_amd_demonstrations/scripts/save_map
- 地图保存在$HOME/experiment_files,按时间命令入如:map_1725188425.pgm map_1725188425.yaml
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号