



















ROS2与Nav2应用opennav仿真教程-启动仿真
说明
- 介绍如何启动仿真和查看相关传感器数据
步骤
- 启动仿真
ros2 launch honeybee_bringup robot.launch.py use_simulation:=true use_sim_time:=true
- gazebo效果图

查看话题列表
ubuntu@WALKING-ARM-V400:~/ros2_opennav_ws$ ros2 topic list
/clock
/cmd_vel
/diagnostics
/joint_state_broadcaster/transition_event
/joy_teleop/cmd_vel
/joy_teleop/emergency_stop
/joy_teleop/joy
/joy_teleop/joy/set_feedback
/parameter_events
/platform/cmd_vel_unstamped
/platform/dynamic_joint_states
/platform/joint_states
/platform/odom #底盘原始里程
/platform/odom/filtered #robot_localiation 融合imu的里程
/platform_velocity_controller/transition_event
/rc_teleop/cmd_vel
/robot_description #模型
/rosout
/sensors/camera_0/camera_info
/sensors/camera_0/color/image #相机普通图像
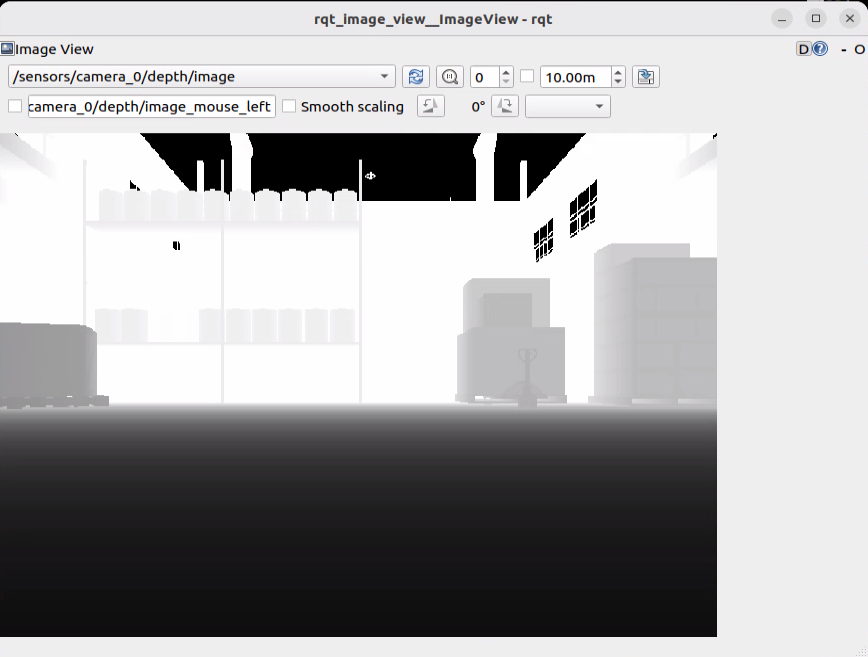
/sensors/camera_0/depth/image #相机深度图
/sensors/camera_0/depth_image/compressed #压缩的相机深度图
/sensors/camera_0/depth_image/compressedDepth
/sensors/camera_0/depth_image/theora
/sensors/camera_0/image/compressed
/sensors/camera_0/image/compressedDepth
/sensors/camera_0/image/theora
/sensors/camera_0/points #相机点云图
/sensors/gps_0/fix #GPS数据
/sensors/imu_0/data #IMU0滤波后数据
/sensors/imu_0/data_raw #imu0原始数据
/sensors/imu_1/data #IMU1数据
/sensors/lidar_0/points #雷达3D点云
/sensors/lidar_0/scan #雷达2D数据
/set_pose
/tf
/tf_static
查看2D激光数据
- 查看方法
#执行命令:
$ros2 topic echo /sensors/lidar_0/scan
#效果图
---
header:
stamp:
sec: 987
nanosec: 702000000
frame_id: os0_sensor
angle_min: -3.1415927410125732
angle_max: 3.1415927410125732
angle_increment: 0.012269999831914902
time_increment: 0.0
scan_time: 0.10000000149011612
range_min: 0.0
range_max: 25.0
ranges:
- 6.956625938415527
- 6.953227519989014
- 6.952084064483643
- 6.954678535461426
- 6.9585065841674805
- 6.96042013168335
- '...'
intensities: []
---
查看激光点云数据
- 查看方法
#执行命令
$ros2 topic echo /sensors/lidar_0/points
#效果图
---
header:
stamp:
sec: 4795
nanosec: 302000000
frame_id: os0_sensor
height: 32
width: 512
fields:
- name: x
offset: 0
datatype: 7
count: 1
- name: y
offset: 4
datatype: 7
count: 1
- name: z
offset: 8
datatype: 7
count: 1
- name: intensity
offset: 16
datatype: 7
count: 1
- name: ring
offset: 24
datatype: 4
count: 1
is_bigendian: false
point_step: 32
row_step: 16384
data:
- 0
- 0
- 128
- 255
- 0
- 0
- 0
- '...'
is_dense: false
---
查看相机内容
- 查看方法
ros2 run rqt_image_view rqt_image_view
- image_view效果图

查看TF
- 查看方法
ros2 run rqt_tf_tree rqt_tf_tree
- rqt_tf_tree 效果图

查看里程
- 查看方法
#执行命令
ros2 topic echo /platform/odom/filtered
#效果
---
header:
stamp:
sec: 5155
nanosec: 731000000
frame_id: odom
child_frame_id: base_link
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance:
- 2725107860669.5864
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 2725107860669.5864
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 9.981549771093918e-07
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 9.963234931470355e-07
- 2.322798902949128e-47
- 0.0
- 0.0
- 0.0
- 0.0
- -2.322798902968046e-47
- 9.963234931470355e-07
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 84.2238000154067
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -1.1532705123907247e-18
covariance:
- 9219904.219843812
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 9219904.219843812
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 9.972375538377388e-07
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 9.891294661536792e-07
- 2.2783782473206132e-55
- 0.0
- 0.0
- 0.0
- 0.0
- -2.2783782473218923e-55
- 9.891294661536792e-07
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 9.999944445061722e-10
---
查看GPS
- 查看方法
#执行命令
$ ros2 topic echo /sensors/gps_0/fix
#效果
---
header:
stamp:
sec: 5180
nanosec: 1000000
frame_id: gps_0_link
status:
status: 0
service: 0
latitude: 38.16148013501569
longitude: -122.45472332975721
altitude: 488.2450044397265
position_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
position_covariance_type: 0
---
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号