



















turbot3-4ws四轮转向仿真教程-gmapping建图
说明
- 介绍如何通过gmapping进行建图
步骤
- 启动仿真
- 默认已经手柄和进行话题转换
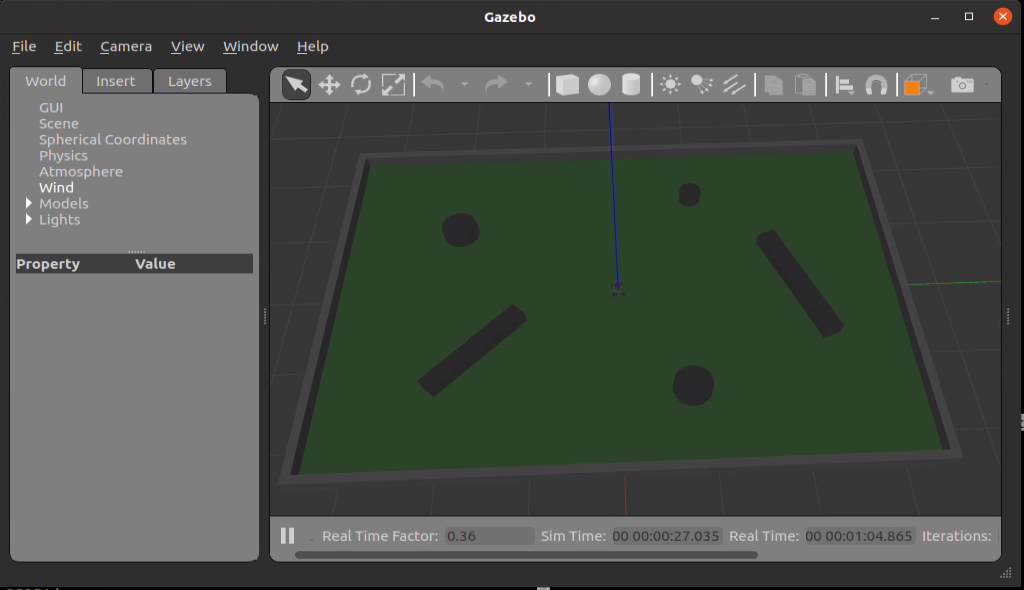
roslaunch turbot3_4ws_gazebo map_simulation.launch
- gazebo效果图
- 启动建图
roslaunch turbot3_4ws_navigation gmapping_sim.launch
- 通过手柄控制小车移动,实现建图
- rviz效果图

- 保持地图
rosrun map_server map_saver -f four_ws_map
- 效果
$ rosrun map_server map_saver -f four_ws_map
[ INFO] [1724053150.852079089]: Waiting for the map
[ INFO] [1724053151.124625829, 102.496000000]: Received a 4000 X 4000 map @ 0.050 m/pix
[ INFO] [1724053151.125028362, 102.496000000]: Writing map occupancy data to four_ws_map.pgm
[ INFO] [1724053152.420966744, 102.929000000]: Writing map occupancy data to four_ws_map.yaml
[ INFO] [1724053152.421524792, 102.929000000]: Done
- 地图保存执行命令的当前目录下,名为four_ws_map.pgm和four_ws_map.yaml
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号