



















farmbot入门教程-移动序列命令
说明:
- 移动 FarmBot 的电机
移动
MOVE命令指示 FarmBot 移动到新位置。要使用此命令,首先 从下拉列表中选择一个位置。选项包括:
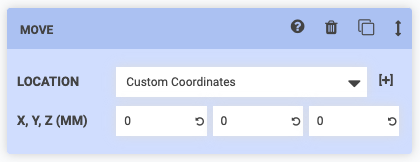
- 自定义坐标
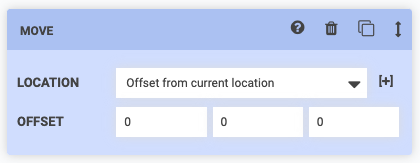
- 相对于当前位置的偏移量
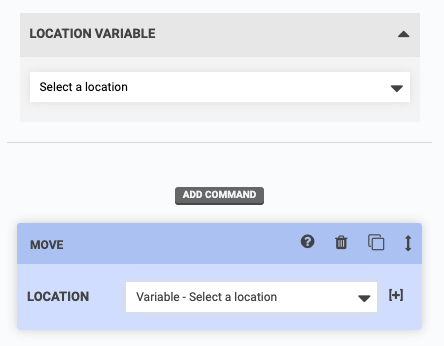
- 位置变量
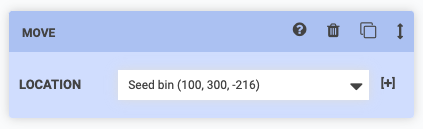
- 工具和种子容器的位置
- 工厂位置
- 地图点
- 杂草丛生的地方
自定义坐标
- 选择自定义坐标选项时,将显示三个输入字段,允许您指定希望 FarmBot 移动到的精确X、Y、Z坐标。
相对于当前位置的偏移量
- 当选择从当前位置偏移量选项时,将显示三个输入字段,允许您指定希望 FarmBot 移动到的偏移量
位置变量
- 选择变量 - 添加新变量时,变量形式将添加到序列标题中。在序列标题中选择变量值后,所有设置为该变量的移动步骤中的下拉选项都将更新。有关更多信息,请参阅变量文档
其他地点
- 当选择工具或种子容器位置、植物位置、地图点或杂草位置时,这些资源将变为正在使用状态,这意味着除非您将其从序列中删除,否则无法删除它们。如果您更新它们的坐标,您的序列步骤将自动更新
移动到工具或种子容器时要小心
在大多数情况下,您需要分多个步骤安装工具或从种子容器中拾取种子。首先,您应该移动到具有正 z 轴偏移的工具或种子容器。这将允许 FarmBot 在第二步(无 z 轴偏移)从上方下降到工具上或种子容器中。
如果您尝试移动到某个位置来安装工具或一次性拾取种子,则可能会出现 z 轴移动得太低太快的风险,导致 FarmBot 撞到工具和/或弯曲种子注射针。
高级选项
- 在[+]下拉菜单中,您将找到几个用于修改基本位置的选项和几个用于更改 FarmBot 执行移动方式的选项。默认情况下,如果您更改了任何选项的默认值,应用程序将仅以打开状态加载[ +]选项。如果您希望[+]选项始终以打开状态加载,请将默认打开选项设置为是序列标题中的菜单
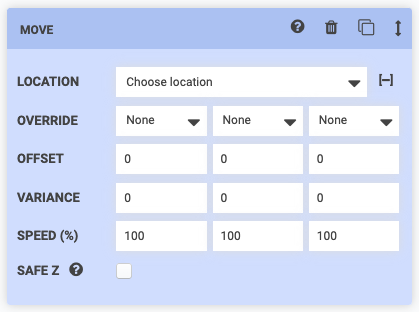
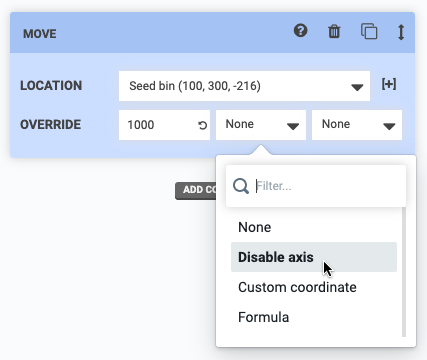
覆盖
OVERRIDE允许您使用新值覆盖LOCATION字段中的 X、Y 和/或 Z 值。您可以输入自定义坐标、公式或完全禁用轴。Z 轴覆盖下拉菜单还包括特殊的安全高度和土壤高度选项
如果您为LOCATION字段选择自定义坐标,OVERRIDE将显示为X、Y、Z (MM)。
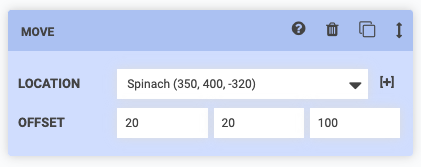
抵消
- OFFSET允许您向基准LOCATION添加正或负偏移。这在将工具从插槽中拉出时或在植物周围或上方浇水时很有用
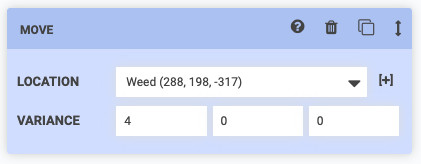
方差
- VARIANCE允许您为运动添加随机性,以防您想要重复执行某个动作(例如抑制杂草),但重复之间的变化很小。在下面的示例中,FarmBot 将移动到 288 +/- X 轴上 0 到 4 之间的随机方差。因此,最终的 X 位置将是 284 到 292 之间的随机值
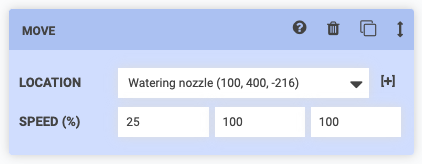
速度
- 速度 (%)可让您减慢沿轴的移动速度,以提高精度,例如在安装和拆卸工具时。速度是每个轴的最大速度的百分比
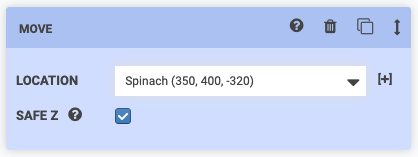
安全 Z
SAFE Z允许您指示 FarmBot 将 MOVE 命令作为三个不同的动作执行
将 Z 移动到安全 Z 高度
将 X 和 Y 移动到新位置
将 Z 移动到新位置当您需要 FarmBot 穿过花园但又想确保它不会撞到任何植物或其他物体时,这很有用
寻找原始点
- 查找原点命令指示 FarmBot 自动查找所选轴的原点位置。如果选择全部,FarmBot 将按以下顺序逐个查找每个轴的原点:z 轴、y 轴、x 轴
- 编码器、失速检测或限位开关必须处于打开状态,FarmBot 才能自动找到家
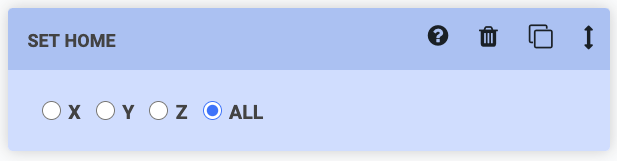
设为首页
- 设置主位置命令指示 FarmBot 将当前位置沿轴设置为0,也称为Home该轴的位置。如果选择ALL,FarmBot 会将所有轴设置为零
查找轴长度
- FIND AXIS LENGTH命令指示 FarmBot 自动查找所选轴的长度。如果选择ALL,FarmBot 将按以下顺序逐个查找每个轴的长度:z 轴、y 轴、x 轴
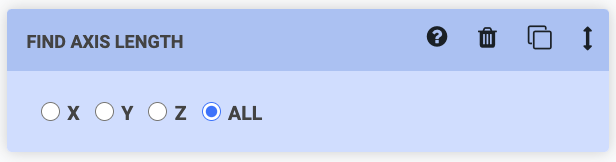
- 编码器、失速检测或限位开关必须处于打开状态,FarmBot 才能自动找到轴长
控制伺服
- 控制伺服命令指示 FarmBot 将伺服移动到提供的角度
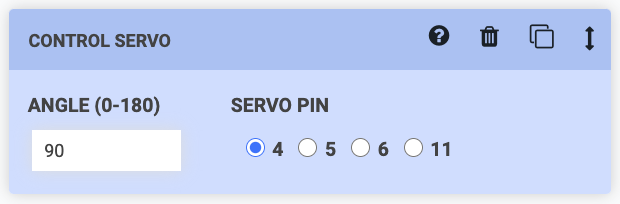
- 暂停一下
因为微控制器不知道伺服何时达到所需的角度,所以您可能需要在控制伺服命令之后直接使用等待命令,以确保伺服在 FarmBot 移动到序列的下一步之前到达其目的地
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号