



















Turbot4-ARM仿真入门教程-通过命令控制云台
说明
- 介绍如何通过命令来控制云台
控制
- 1.启动仿真
#加载仿真环境
. /usr/share/gazebo/setup.bash
#gazebo
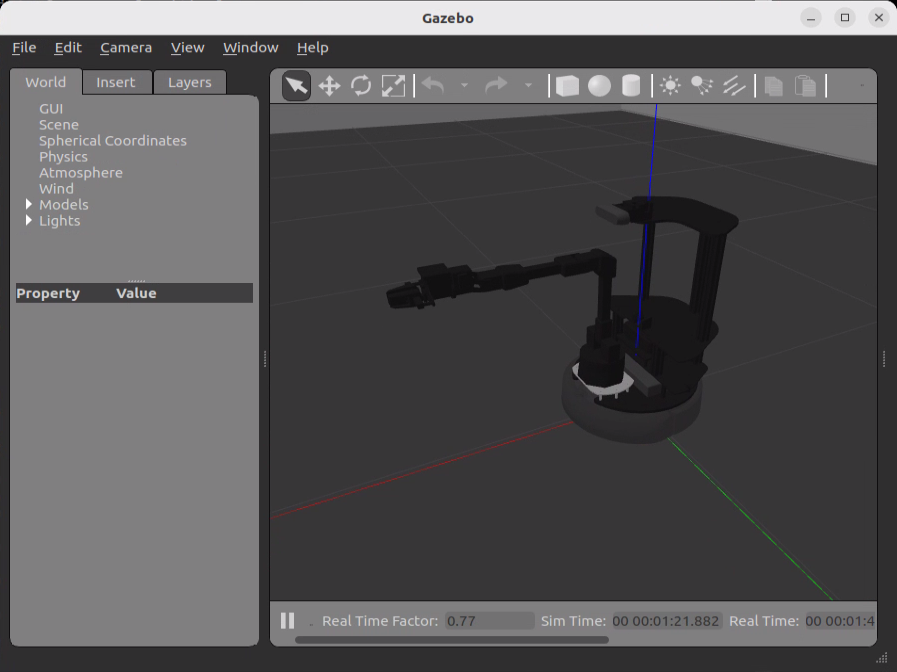
ros2 launch interbotix_xslocobot_sim xslocobot_gz_classic_nav.launch.py robot_model:=locobot_wx200 verbose:=true
- gazebo效果图
- 相关命令
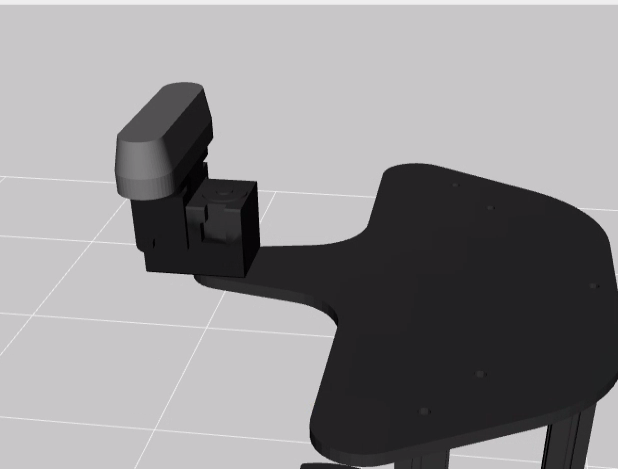
这个是2自由度云台,pan(平移)和tilt(倾斜)
云台是通过话题/locobot/camera_controller/commands来控制
使用std_msgs/msg/Float64MultiArray的数据内容
pan的urdf文件定义
<limit effort="2" lower="-1.5707963267948966" upper="1.5707963267948966" velocity="3.141592653589793"/>
- tilt的urdf定义
<limit effort="2" lower="-1.5707963267948966" upper="1.3089969389957472" velocity="3.141592653589793"/>
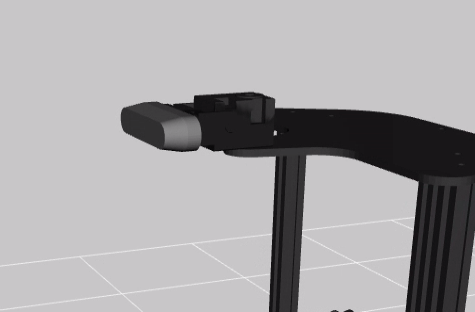
- home位,也是默认位,具体控制命令如下:
ros2 topic pub /locobot/camera_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.0, 0.0]}"
- rviz效果图:
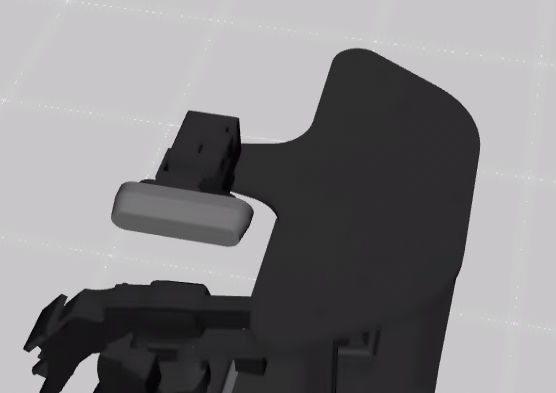
- 左正位,命令如下:
ros2 topic pub /locobot/camera_controller/commands std_msgs/msg/Float64MultiArray "{data: [1.57, 0.0]}"
- rviz效果图
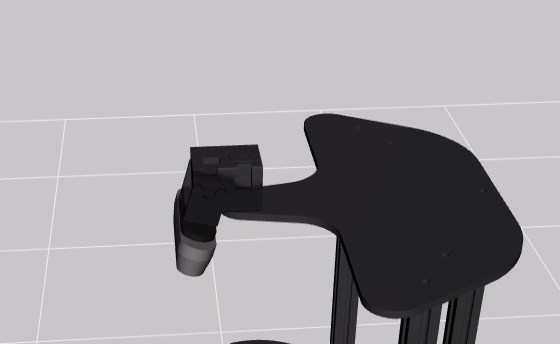
- 右正位,命令如下:
ros2 topic pub /locobot/camera_controller/commands std_msgs/msg/Float64MultiArray "{data: [-1.57, 0.0]}"
- rviz效果图

- 下斜位,命令如下:
ros2 topic pub /locobot/camera_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.0, 1.308]}"
- rviz效果图
- 上正位,命令如下:
ros2 topic pub /locobot/camera_controller/commands std_msgs/msg/Float64MultiArray "{data: [0.0, -1.57]}"
- rviz效果图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号