



















farmbot软件入门教程-步进
说明:
微步进允许步进驱动器将步进电机轴定位在全步之间,从而实现更平稳、更安静的运动。FarmBot Genesis v1.2、v1.3 和 v1.4 套件附带的 RAMPS 屏蔽、Farmduino 和 A4988 步进驱动器允许全步进、1/2 步进、1/4 步进、1/8 步进和 1/16 步进设置。每个步进驱动器的微步进设置都是通过跳线引脚或DIP 开关设置的。
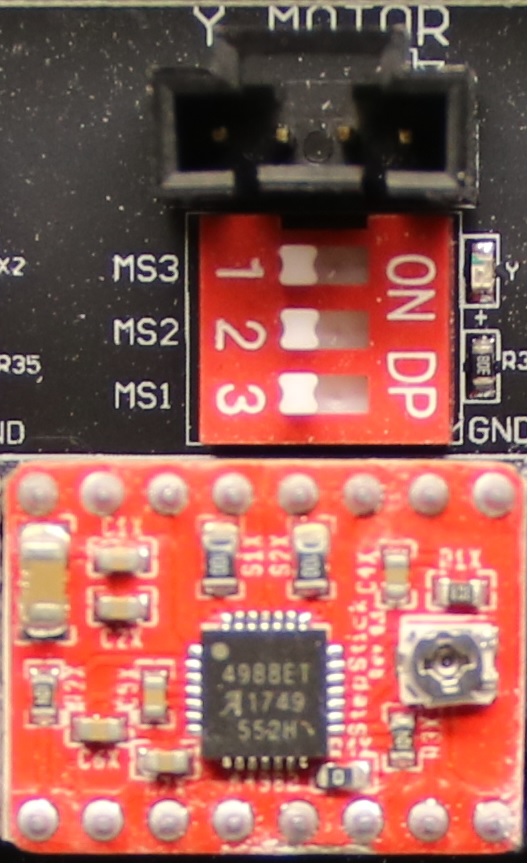
在 Farmduino 板上,微步进由位于A4988 步进驱动器MS1正上方的、MS2和MS3 DIP 开关控制。
普通 FarmBots 默认设置为使用全步进(无微步进),这意味着微控制器发出的一个步进脉冲将使电机轴移动一整步。对于普通 200 步/转电机,这相当于 1/200 转。如果将驱动器设置为 1/2 步微步进,则微控制器发出的每个步进脉冲将使电机移动 1/2 步,或 1/400 转。这意味着完整的电机步进需要 Arduino 发出两个步进脉冲。
如果您使用微步进,则需要在Web 应用程序的电机设置部分进行更改,以匹配硬件 DIP 开关位置。

当您更改“MICROSTEPS PER STEP”设置时,“STEPS PER MM”将自动调整以进行补偿。
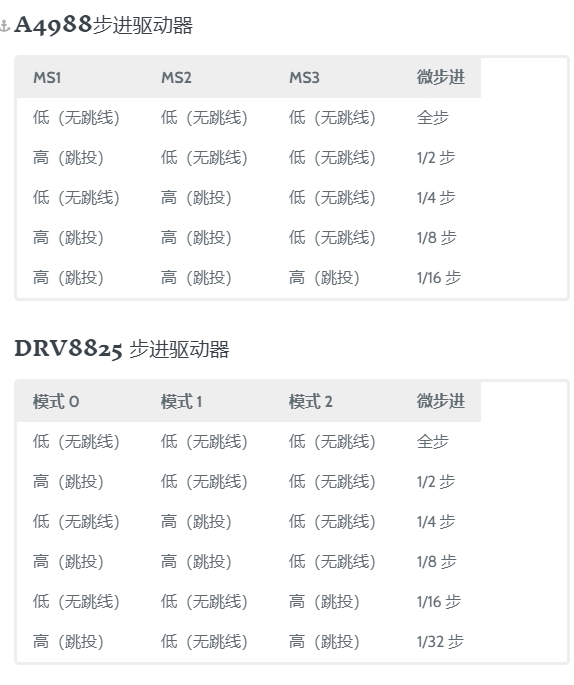
下表显示了 A4988 和 DRV8825 步进驱动器可用的微步进设置。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号