



















farmbot软件入门教程-失速检测
说明:
介绍FarmBot Express 电机负载检测设置
失速检测设置仅适用于 FarmBot Express 机器人。FarmBot Genesis 用户应参考编码器部分
FarmBot Express 机器人的失速检测功能利用 Trinamic TMC2130 步进驱动器测量反向电流的能力来确定电机负载,从而确定何时发生失速。有关更多详细信息
启用失速检测
启用电机失速检测来检测错过的步骤、查找轴长度和查找原点
仅推荐用于 X 和 Y 轴,由于克服重力抬起 Z 轴会产生较高的电机负载,因此不建议在 Z 轴上使用失速检测
最大电机负载
- 步进驱动器确定的最大电机负载(满分为 100),在电机被视为失速之前。应设置得足够高以防止误检失速,并设置得足够低以确保机器人失速时能够被正确检测到
调整失速检测
每种安装都有不同的特点,需要调整失速检测和电机设置以获得最佳失速检测性能。调整的目标是:
- 可靠地检测 FarmBot 何时因遇到障碍物、寻找原点位置或寻找轴长而停滞。
- 避免在正常运动过程中出现错误的失速检测。
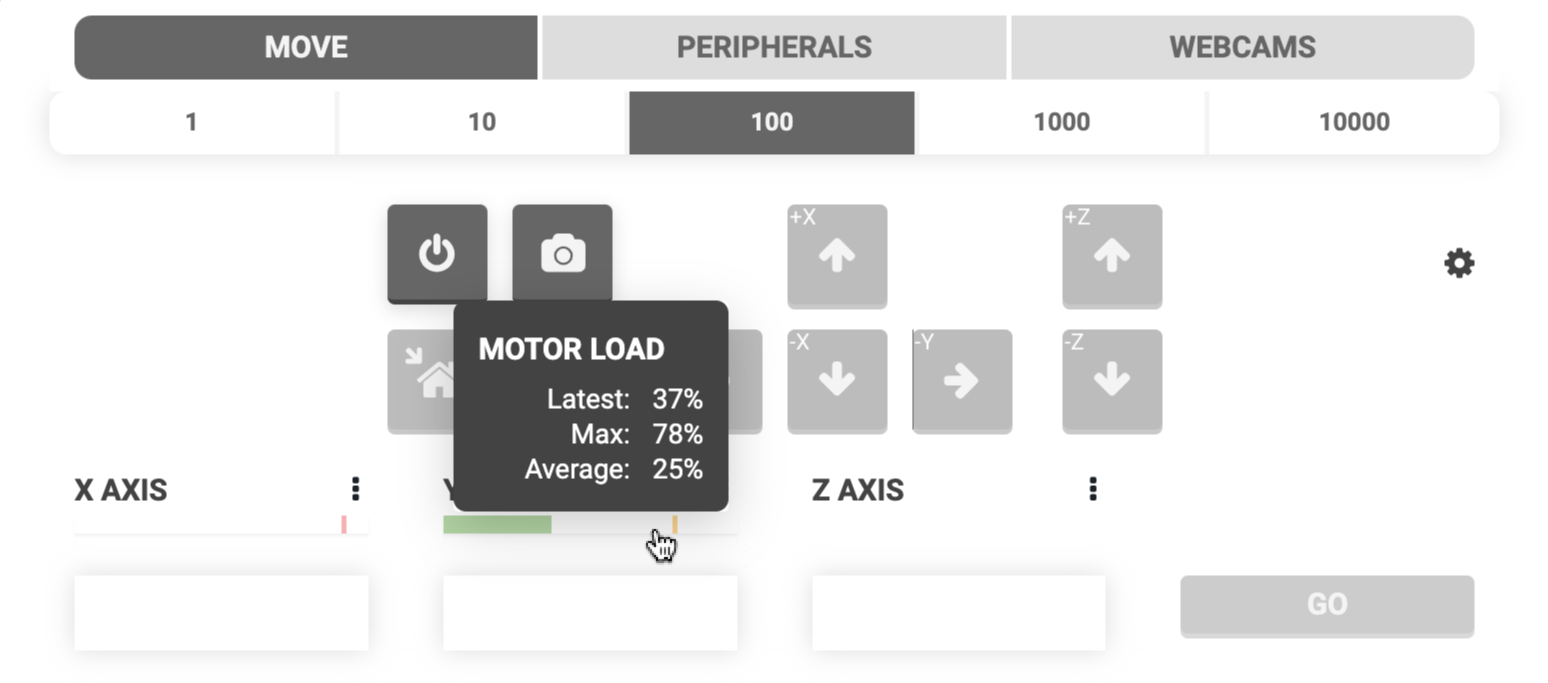
为了实现这两个目标,实时电机负载在正常运动期间必须保持在最大电机负载以下,并在电机真正停转时超过最大电机负载。要实时查看最新、最大和平均电机负载读数,请点击控制弹出窗口中的电机负载指示器
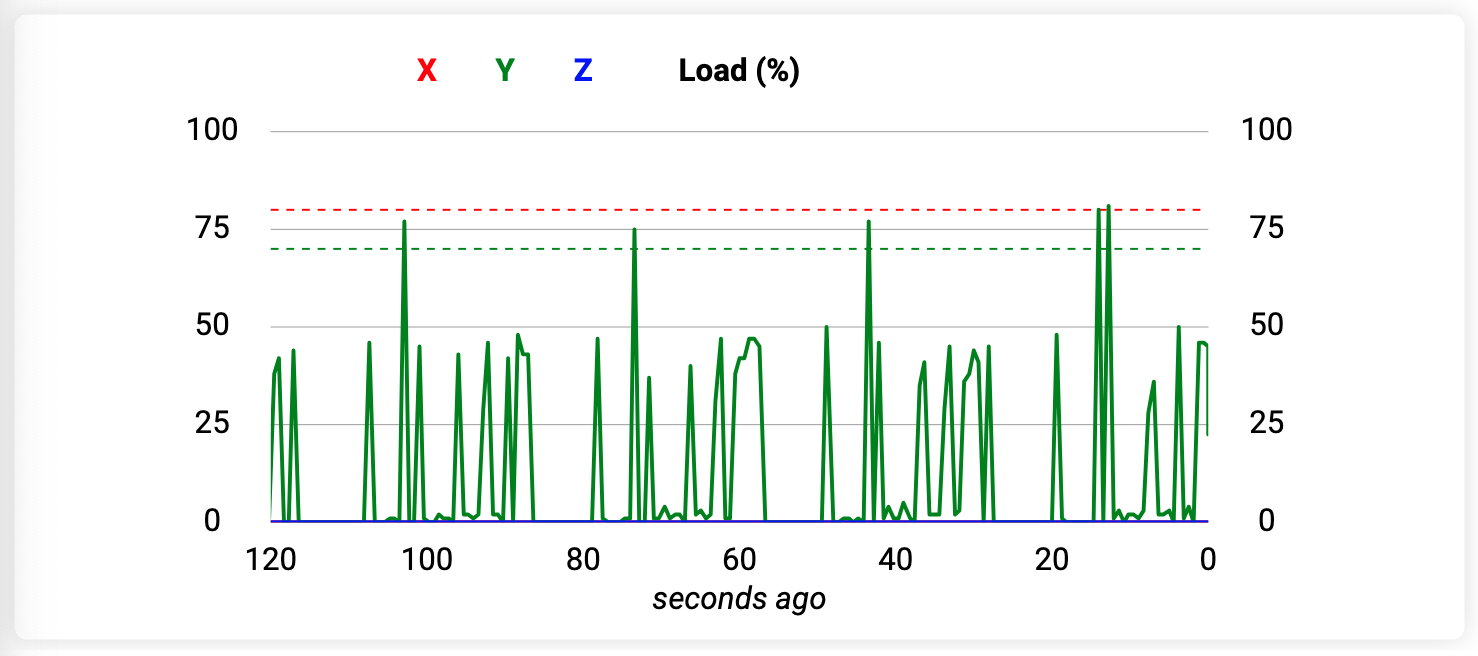
- 要查看电机负载随时间的变化图,请点击控制弹出窗口中的图标并打开电机负载图。水平虚线表示每个轴的最大电机负载,让您可以直观地看到实时电机负载何时超过最大阈值
调整最大电机负载
如果您的 FarmBot 在正常运动过程中错误地检测到失速,请尝试以 5 为增量增加 MAX MOTOR LOAD。如果您的 FarmBot 在应该检测到失速时没有检测到,请尝试以 5 为增量减少 MAX MOTOR LOAD。确保在进行更改后测试各种运动条件:
- 正向和负向运动
- 沿轴线在不同位置的运动
- 寻找原点并找到轴长
- 手握FarmBot打造真实摊位
调整速度和加速度
如果调整最大电机负载不能改善失速检测性能,请尝试调整电机速度和加速度设置。
电机负载读数对电机速度非常敏感,当电机缓慢移动(低于约 80 毫米/秒)时,负载会显著增大。在运动的加速和减速阶段尤其如此。
一旦电机移动得更快(80 毫米/秒或更快),步进驱动器将检测到较低的负载。减少以低于 80 毫米/秒的速度行驶所花费的时间的最佳方法是以 5 为增量缩短加速距离并以 5 为增量增加最小速度。它也可以通过增加最大速度来影响,尽管效果较小。
请记住,在极短的距离内加速是不合理的,因为电机必须使整个龙门架的质量达到速度。加速太快或最低速度太高会导致速度突然变化,从而影响准确性。
关闭失速检测
- 如果找不到适合所有运动场景的设置,您可以禁用失速检测。请记住,当 FarmBot 因障碍物而停用或 FarmBot 断电并重新启动时,您需要手动设置起始位置。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号