



















farmbot软件入门教程-轴
说明:
- 介绍轴主轴、长度和位置预设
寻找原点
寻找原点指示 FarmBot 向原点移动,直到旋转编码器、步进驱动器或限位开关发出信号,表示已到达轴的末端,从而找到原点(最小)位置。请注意,编码器、失速检测或限位开关必须处于开启状态,FarmBot 才能自动找到原点。
要找到轴的归位点,请单击“查找归位点 X”、“查找归位点 Y”或“查找归位点 Z”按钮。要找到所有三个轴的归位点,您可以使用控制面板中的按钮(假设该按钮设置为其默认行为)。
“寻找家”不同于“回家”
- 寻找原点是使用旋转编码器、失速检测步进驱动器或限位开关寻找原点(零点)位置的行为。返回原点是移动到 (0, 0, 0) 的行为。
设为首页
按下SET HOME X、SET HOME Y和SET HOME Z按钮可手动将 FarmBot 的当前位置设置为该轴的原点位置。这用于在编码器、失速检测或限位开关关闭时手动设置原点位置。
但是,由于库存 FarmBots 具有编码器和失速检测功能,因此建议使用查找主位置功能自动查找每个轴的主位置并将该位置设置为零。
一般来说,不应经常使用设置零按钮,因为一旦您的花园开始生长,改变零位置就没有意义了,而且所有 FarmBot 都应该启用编码器或失速检测,以便自动查找和设置原始位置。
当您尝试实验序列或探索 FarmBot 的替代坐标系统配置时,这些按钮可能会派上用场。
启动时找到主页
此设置已被弃用,取而代之的是BOOT SEQUENCE设置,该设置允许对启动过程进行更多自定义
默认情况下不显示此高级设置。
启用此设置将在启动时为每个轴运行归位命令。这对于允许 FarmBot 在断电后恢复并继续运行非常有用。请注意,此功能必须启用编码器、失速检测或限位开关。
停在原点
停止在主位置的软件限制可防止 FarmBot 移动通过每个轴的零坐标。例如,如果轴通常在正坐标中移动,则软件限制将阻止它通过零移动到负坐标。如果轴启用了仅负坐标,则它通常在负坐标中移动,软件限制将阻止它通过零移动到正坐标
这些设置默认为所有三个轴启用,因此 FarmBot 永远不会尝试移动通过原点 (0, 0, 0) 位置。仅在某些自定义安装情况下才应禁用这些设置
最大停止
- 如果轴的SET AXIS LENGTH设置不为零,FarmBot 将在轴的最大值处停止。默认情况下,所有三个轴均启用这些设置,并且仅在某些自定义安装情况下才应禁用
仅限负坐标
- 此设置将允许移动仅发生在所选轴的负坐标中。如果您希望您的原点位置位于最高点,并且 FarmBot 向下移动到负坐标,则这对 z 轴最有用
查找轴长度
查找轴长度指示 FarmBot 找到最大位置,然后找到最小(原点)位置,同时测量两者之间的距离,即轴的长度。请注意,编码器、失速检测或限位开关必须处于开启状态,FarmBot 才能自动查找轴长度
另请注意,您必须启用STOP AT MAX才能让 FarmBot 在测量的最大值处停止
当前,寻找轴长度的速度由HOMING SPEED设置决定
设置轴长度
通过这些输入,您可以手动指定每个轴的长度(以毫米为单位)。如果您想使用软件而不是物理硬件停止器(例如皮带夹或限位器)来限制 FarmBot 沿轴的移动,这将非常有用。例如:您可能偶尔想阻止花园远端的移动,因为您在那里放置了一个季节性花园小矮人,但您不想调整皮带和皮带夹。您必须启用STOP AT MAX才能让 FarmBot 停止在输入的值处
龙门高度
龙门高度是 Z 轴完全升起时 FarmBot 工具头底部与龙门主梁底部之间的距离(以毫米为单位)。它用于确定植物是否太高,龙门无法越过。
任何会影响 Z 轴可升高的最大高度的硬件修改之后都应更新此设置,例如,更改下部 Z 轴硬停的位置。
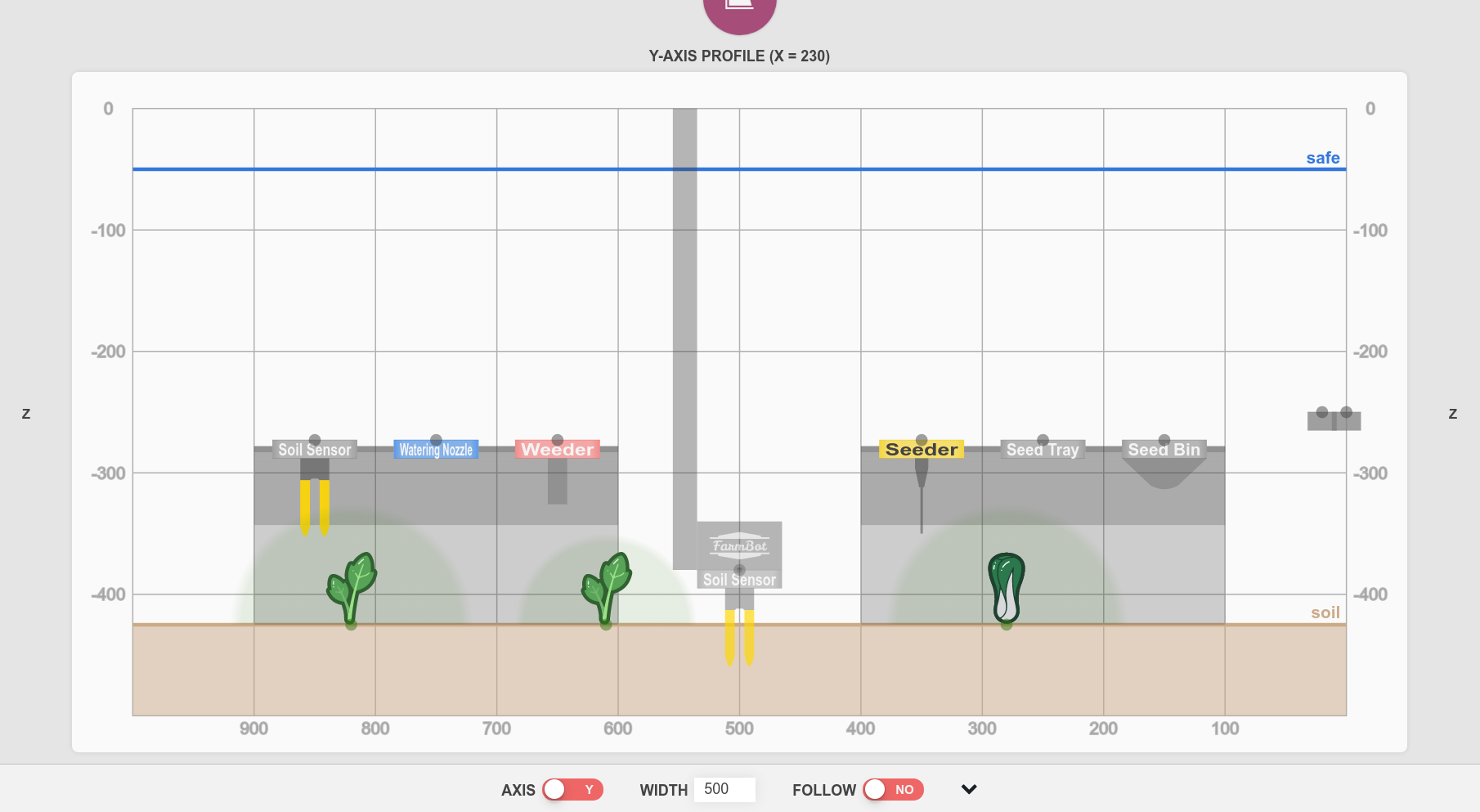
安全高度
安全高度是 Z 轴坐标(以毫米为单位),在安全 Z移动期间或在移动命令中选择安全高度作为 Z 轴覆盖时,Z 轴应缩回至该坐标。建议选择一个 Z 轴全程向上的值,以提供尽可能多的间隙
后退土壤高度
土壤的 Z 轴坐标(毫米)。当选择土壤高度作为 z 轴覆盖且没有可用的土壤高度测量值时,移动序列命令将使用此值。在自动或手动添加土壤高度测量值后,将根据所选位置使用匹配或插入的土壤高度值
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号