



















farmbot入门教程-控制移动
说明:
- 介绍如何控制移动farmbot
步骤:
- 面板顶部的控件允许您查看FarmBot的当前位置、实时手动移动它、拍照以及回到初始位置或寻找初始位置
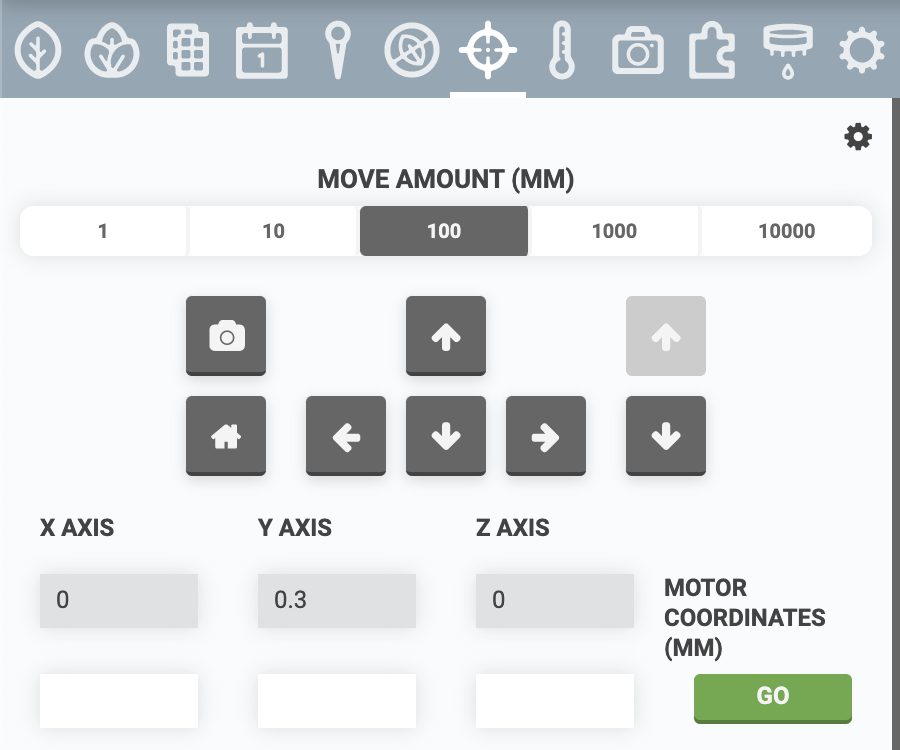
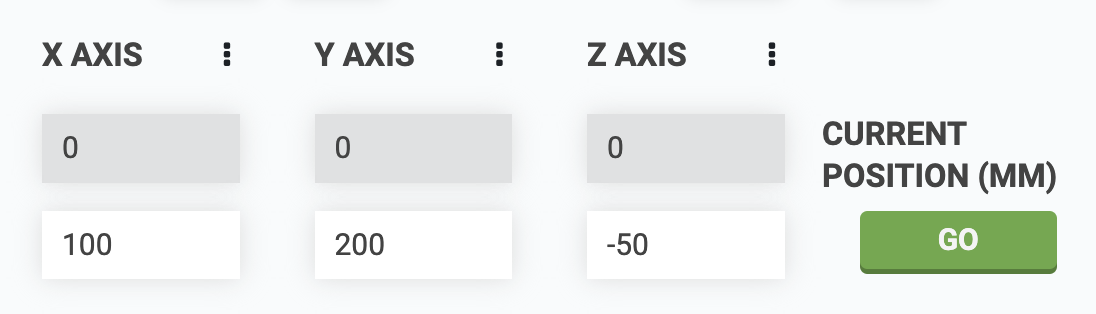
- 查看当前位置。FarmBot 的当前位置(电机坐标 (MM))显示在X 轴、Y 轴和Z 轴标签正下方的灰色区域中。此信息实时更新
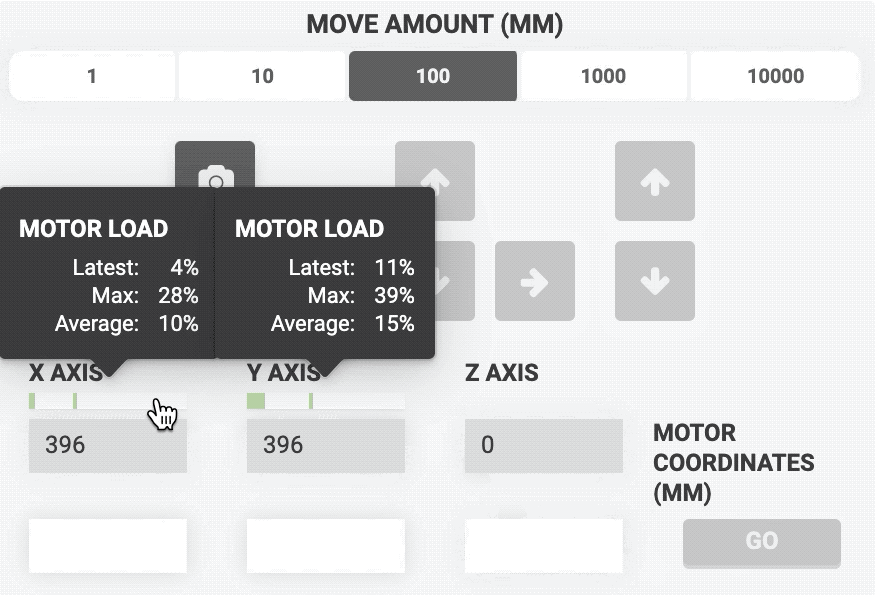
相对运动。使用上下左右箭头按钮。默认的移动金额为100mm,但您也可以选择1、10、1000和10000mm金额
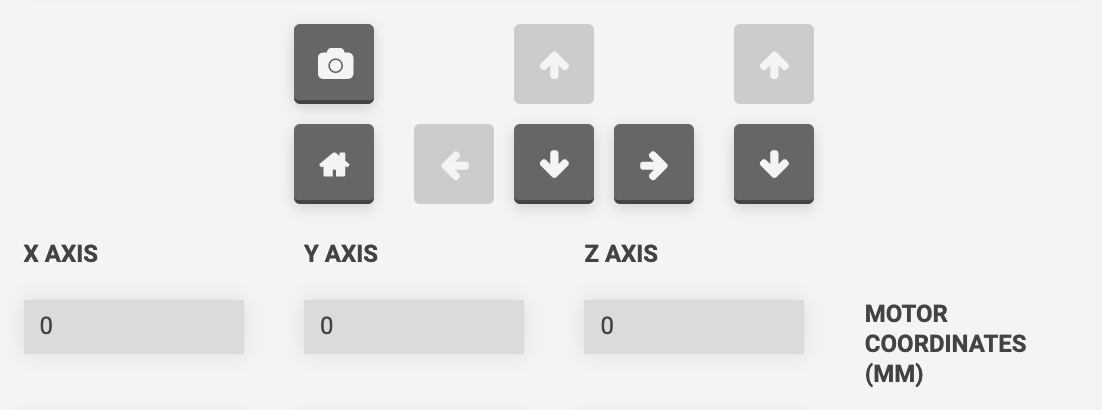
根据您的硬件设置,您可能无法移动到负坐标或超过指定的轴最大值。如果出现这种情况,某些箭头按钮可能会被禁用。在下面的示例中,由于 FarmBot 位于原点位置 (0, 0, 0),因此一半的箭头按钮被禁用,只允许远离原点位置的移动,而不允许穿过原点位置
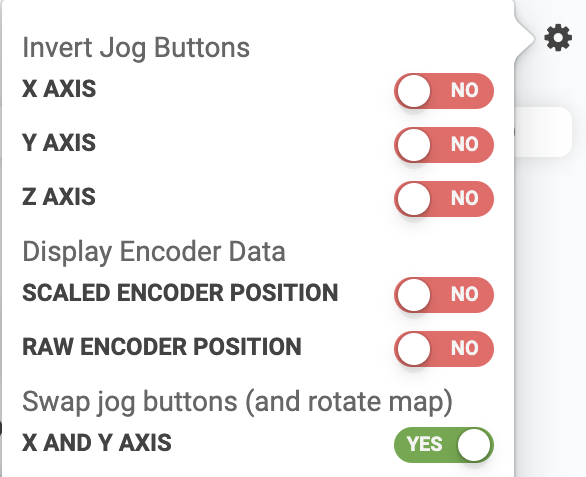
根据您通常查看 FarmBot 的方式,您可能需要更改每个箭头按钮向 FarmBot 发送的方向,以便虚拟控件与您的现实视角相匹配。例如,如果您通常从正面查看 FarmBot(查看工具头上的 FarmBot 徽标),则您希望向左按钮将 FarmBot 发送到该negative Y方向。如果你通常从电子盒的一侧查看 FarmBot,你会希望向左按钮将 FarmBot 发送到该negative X方向
您可以使用“反转慢跑按钮”切换按钮来更改箭头按钮向 FarmBot 发送的每个轴的方向。菜单。您还可以交换 X 轴和 Y 轴按钮,这也会将农场设计器中的地图旋转 90 度
绝对运动。
通过在X 轴、Y 轴和Z 轴的白色输入字段中输入新坐标,然后按GO ,将 FarmBot 移动到绝对位置
如果您没有为任何轴输入新值,那么 FarmBot 将沿该轴保持其当前位置并仅移动所需的轴寻找原点位置。
这按钮图标将指示 FarmBot按照 Z、Y、X 的顺序找到所有轴的原点位置
要回到原点位置
这按钮图标将指示 FarmBot 将所有轴移至原点位置,就像您在(0, 0, 0)移动绝对输入字段中输入了内容一样。请注意,移至原点行为将同时移动所有三个轴
拍摄照片
这按钮将在 FarmBot 的当前位置拍照,并实时提供捕获和上传过程的进度更新。照片可以在照片面板中查看
其他轴控制
除了轴输入字段外,还有用于位于单个轴上的“移动到原点”、“找到原点”、“设置原点”和“找到长度”的控件。弹出窗口
电机负载
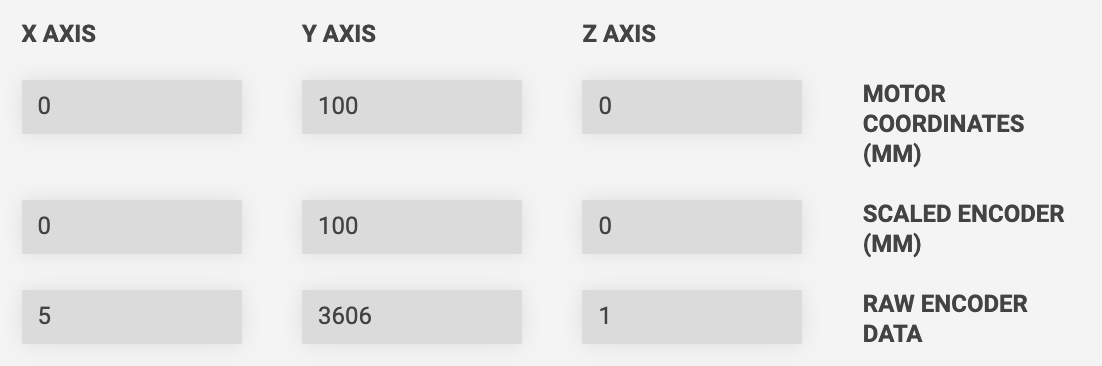
单击每个轴标签下方的负载指示条,查看每个轴的最新、最近最大值和最近平均电机负载
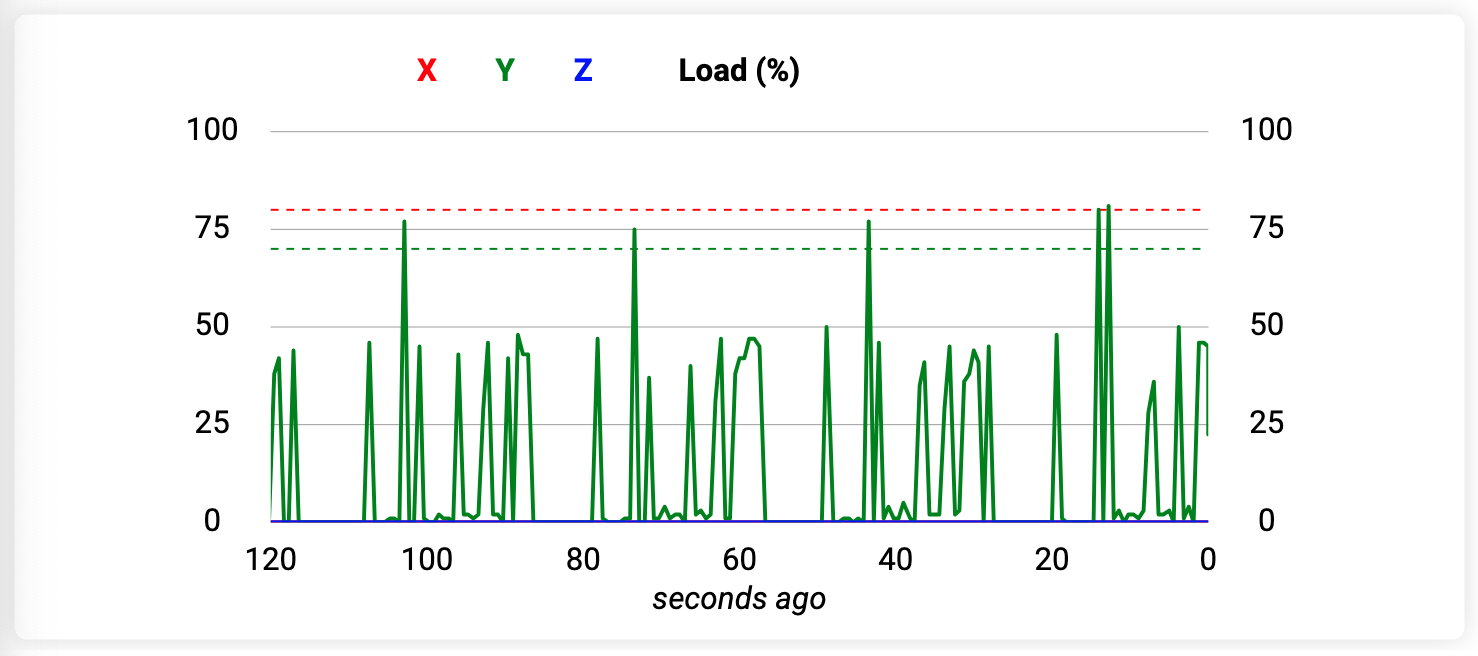
- 要查看电机负载随时间的变化图,请从菜单弹出。水平虚线表示每个轴的最大电机负载,让您可以直观地看到实时电机负载何时超过最大阈值
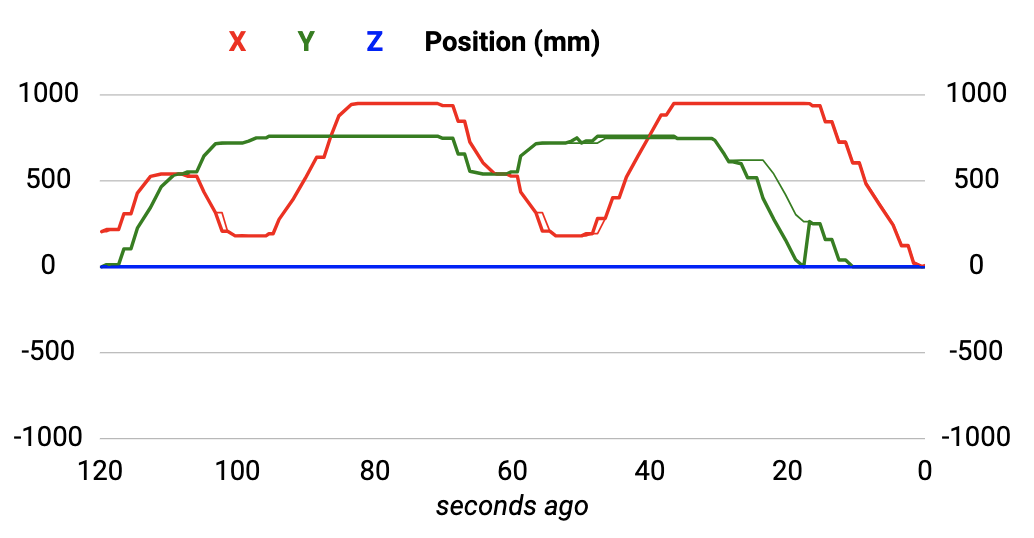
电机位置图
要查看电机位置随时间的变化图,请打开弹出菜单
电源按钮
这按钮显示一个弹出窗口,其中有重新启动、关闭、软重置和硬重置FarmBot 的选项
重启 FarmBot
这将重新启动 FarmBot 的 Raspberry Pi 和 FarmBot OS
关闭 FarmBot
这将关闭 FarmBot 的 Raspberry Pi。要重新打开它,请拔下 FarmBot 的电源插头,然后重新插入
软复位
软重置 FarmBot 将取消 FarmBot 连接到 Web 应用帐户和家庭 WiFi 网络的能力。在将 FarmBot 移动到具有不同 WiFi 网络的新位置之前,或者将 FarmBot 从一个 Web 应用帐户切换到另一个 Web 应用帐户
硬重置
硬重置 FarmBot 将清除设备中的所有数据,让您从头开始。如果您在设置过程中遇到问题,建议这样做
通过将最新版本的 FarmBot OS 重新刷新到 microSD 卡上来执行硬重置。硬重置后,您需要重新配置 FarmBot以将其连接到互联网和您的 Web 应用程序帐户。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号