



















小腾机械臂入门教程-python脚本使用说明和代码讲解
说明:
- 介绍python脚本使用说明和代码讲解
介绍:
- 打开工程文件pythonproject
文件说明
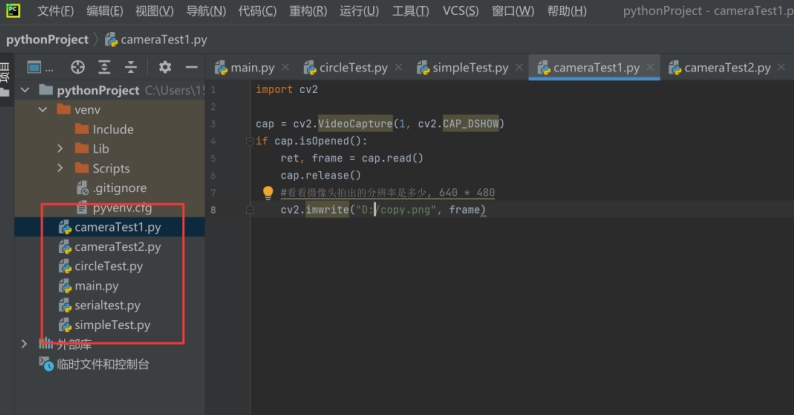
先执行下面三个文件,进行相关测试,确认没问题后,最后再运行 main.py 来控制机械臂。
simpleTest.py:测试下 opencv 库是否安装正常。
cameraTest1.py: 测试摄像头是否能正常拍摄照片,照片保存在 D:/copy.png,检查图片像素属性是否是 640X480,图片是否清晰。
cameraTest2.py: 被抓取物体的位置定位测试脚本,需要反复测试,看看物体的定位是否正确。如果这个脚本有改动的话,注意把 main.py的代码也修改一下,matchImg 方法跟这里的代码是一样的。
Main.py: 真实执行物体抓取的脚本,前面都是测试脚本cameraTest2.py 文件讲解
具体看代码里的注释啊
main.py 讲解
运行 main.py,会提示用户输入命令,每次机械臂抓取完后,都会回到垂直位置,用户再按任意键,再进行第二次抓取
输入相应值,分别代表的以下意思:28 :表示给串口发送 G28 命令,进行机械臂初始化,回到原点,运行一次就可以了。
H :表示机械臂回到默认的位置,也就是初始化的垂直位置。
任意键:发送串口命令,进行物体的抓取代码分析
Main 是程序执行的入口,注意配置好 USB 串口号

Send_message 是往串口发送命令,会把位置命令拼接在一起,然后通过串口发送给机械臂执行。self.contunts 是字符串拼接后命令,matchImg 方法返回抓取物体的坐标位置,M5 是事先打开夹爪,M3 是找到位置后关闭夹爪 G1 X0 Y252 Z20 F50 是抓取到物体后放到指定(实际用户可以自己定义动作命令)
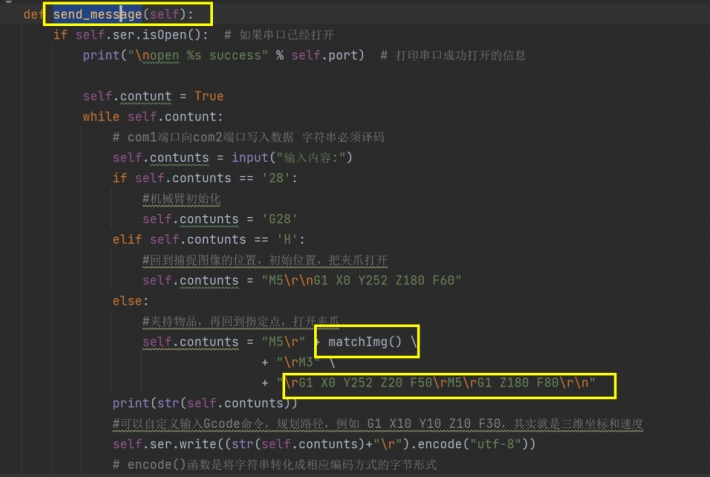
- matchImg 方法跟 cameraTest2.py 内容一样的,先完成 cameraTest2.py 脚本的调试,如
果有任何改动的话,注意把 matchImg 也修改下
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号