



















ROS1与Interbotix系列机械臂教程-硬件介绍
文章说明
- 本教程简单介绍Interbotix系列的机械臂硬件规格
机械臂
- PincherX-100
- PincherX-150
- ReactorX-150
- ReactorX-200
- WidowX-200
- WidowX-250
- WidowX-250 6DOF
- ViperX-250
- ViperX-300
- ViperX-300 6DOF
其他用到的硬件
U2D2
- U2D2控制器是能让计算机与dynamixel舵机的USB转TTL模块
- 更多相关资料,请参阅
[U2D2的电子手册][12]
电源模块

- 更多相关资料,请参阅
[6 Port XM/XL Power Hub的电子手册][14]
机械臂的伸展范围
Reach - Total Length (mm)

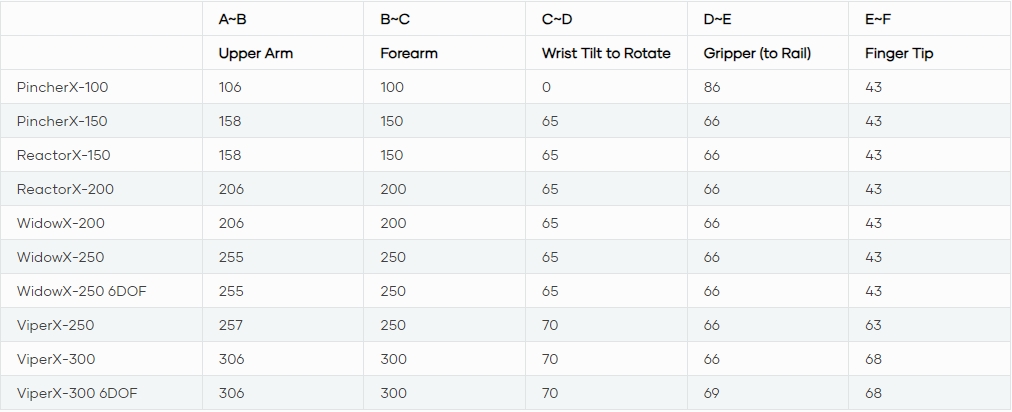
Reach - Section Length (mm)
工作空间
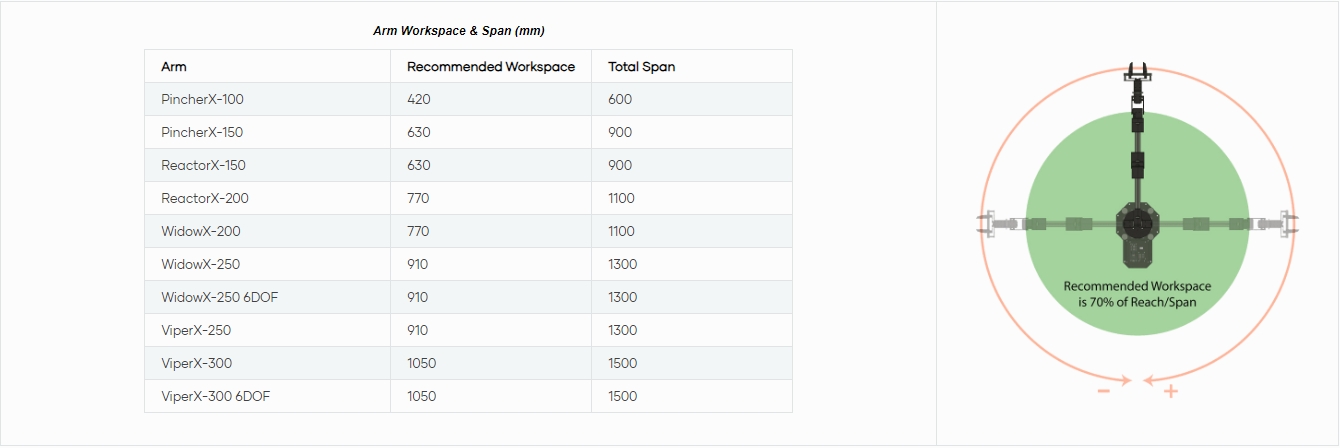
建议工作空间定义为机械臂总跨度的70%
工作负载
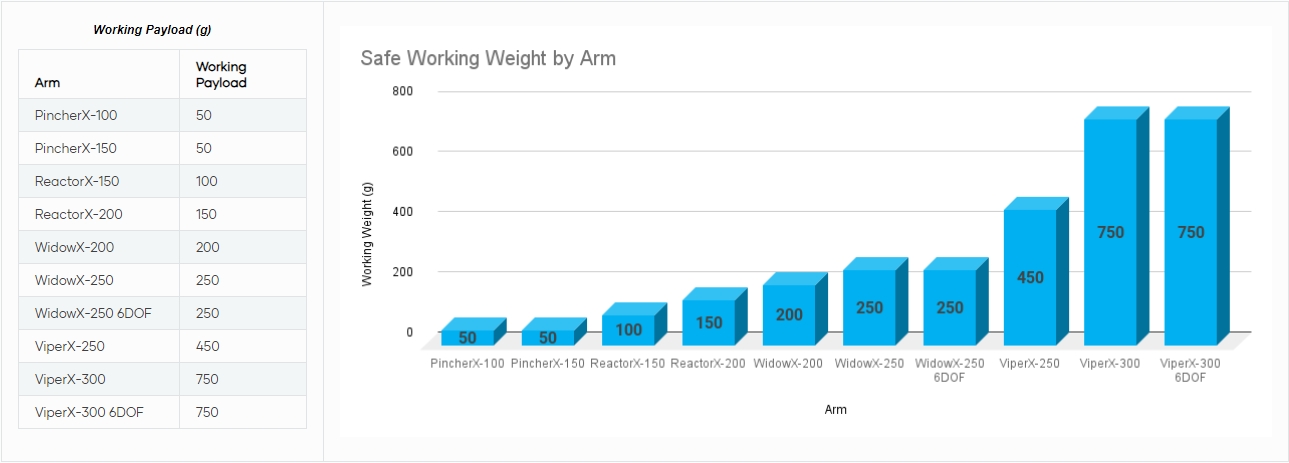
建议机械臂的负重应该在上图所示的安全重量范围之内;当长时间操作时,应适当休息,以免舵机过热。
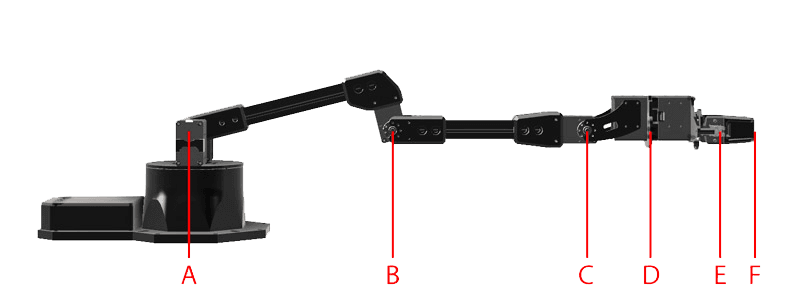
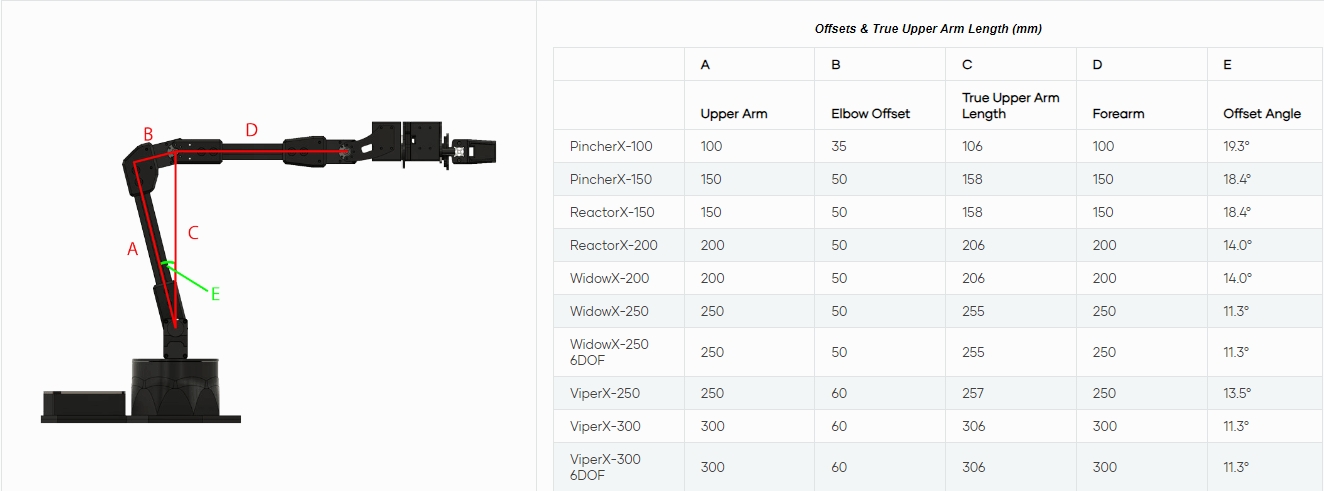
Linkage Dimensions
夹具的夹取范围

夹具的最大最小值是从其中心开始测量
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号