



















ROS2与Android入门教程-利用手机APP发送速度信息
说明
- 介绍如何通过手机APP来发送速度信息,支持ROS2的速度信息
原理
- 1.手机APP与小车的上位机进行配对
- 2.操作手机APP的控制键通过蓝牙发送信息
- 3.小车接收到蓝牙信息,通过python脚本转变为ros2的速度信息,发布到话题/cmd_vel下,从而实现控制
步骤
- 小车端,安装蓝牙服务,如何安装参考上一篇文章
- 手机端,安装APP
- APK地址:http://file.ncnynl.com/ailibot2_apk/ailibot2_app.apk
- 手机打开浏览器,复制地址到浏览器进行下载,再执行安装即可。
配对
- 根据上一篇的方式,通过终端或界面完成配对
使用
- 1.手机端,打开APP,连接蓝牙服务
- 效果如下
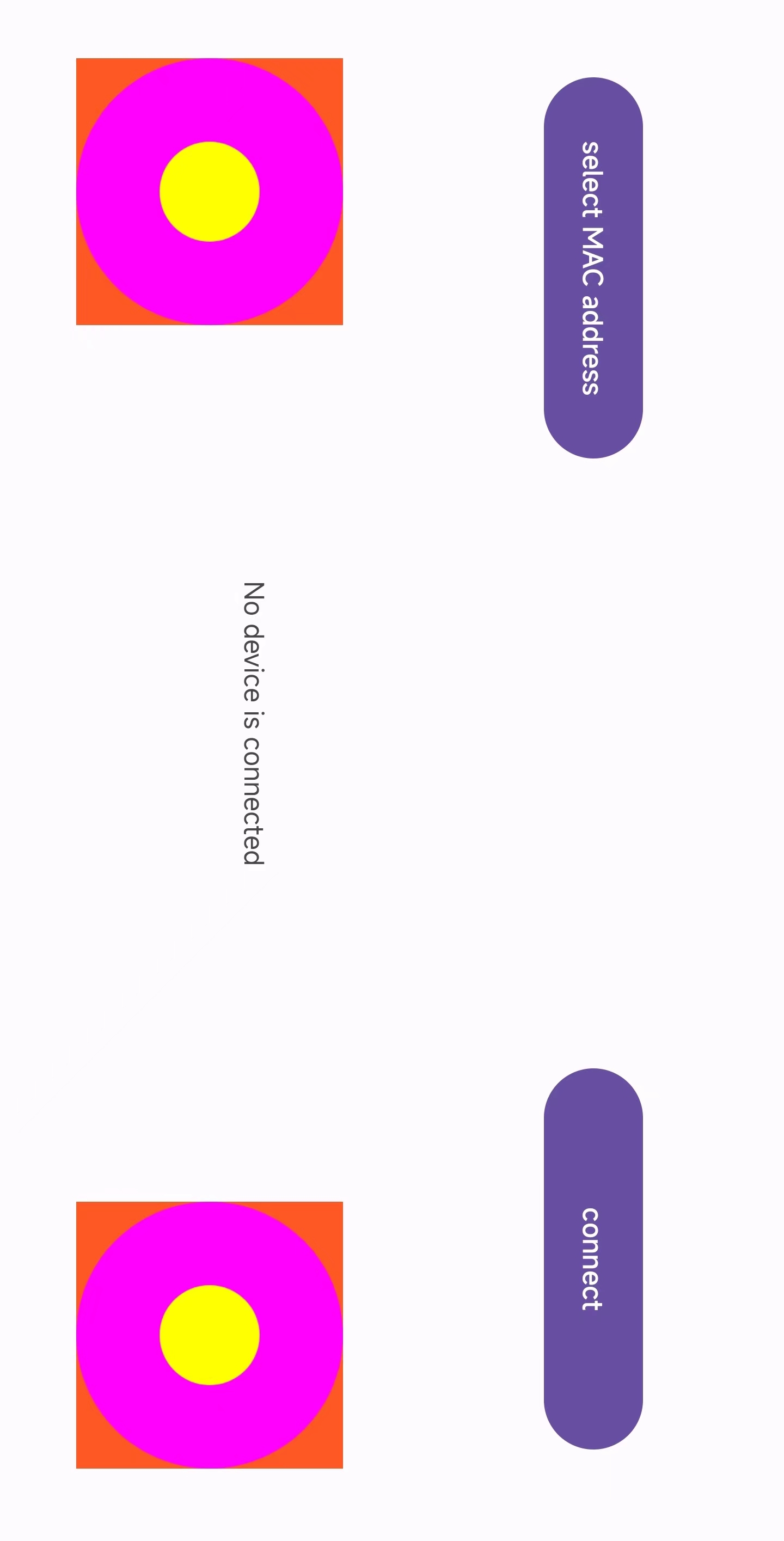
- 点击select MAC address,选择已经配对过的小车蓝牙服务
- 2.小车端,启动速度转换脚本
cd ~/tools/ailibot2_app
sudo hciconfig hci0 piscan
python3 teleop_bluetooth.py
- 3.手机端,点击connect,进行socket连接
- 小车端,连接上后,显示内容
[INFO] [1698289422.093610379] [blt_subscriber]: connecting...
[INFO] [1698289422.096139668] [blt_subscriber]: listening
[INFO] [1698289423.858527430] [blt_subscriber]: connection succeed
[INFO] [1698289423.920709546] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.020428020] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.101273506] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.199986410] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.302482293] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.403548925] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.501895409] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.602690068] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
[INFO] [1698289424.710977851] [blt_subscriber]: recieved : A0.0B0.0C0.0D0.0
- 4.手机端,操作控制
- 通过控制左边的圆盘,进行前后控制
- 通过控制右边的圆盘,进行左右控制
- 5.查看速度命令话题
ros2 topic echo /cmd_vel
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号