



















ROS2与Ailibot2入门教程-利用webrtc查看小车摄像头并控制小车移动
说明
- 介绍如何通过webrtc来实时查看小车摄像头并控制小车移动
- 环境: 树莓派4B + 树莓派摄像头v2.1以上
- 硬件:ailibot2小车套件,需要含树莓派摄像头
原理:
- 通过bot_box的webrtc功能和结合roboportal.io实现,摄像头数据获取和控制小车
相关设备:
- ailibot2差速系列:采购Ailibot2-D2,采购Ailibot2-D4
- ailibot2全向系列:采购Ailibot2-M4,采购Ailibot2-O3,采购Ailibot2-O4
步骤:
- 小车端,安装bot_box, 位于
~/tools/bot_box
# 安装rcm
curl -k https://www.ncnynl.com/rcm.sh | bash -
# 安装bot_box
rcm common_rpi install_bot_box
- 配置roboportal.io账号, 进入网站注册账号并登录
- 新增机器人,点击右上角“connect new robot”
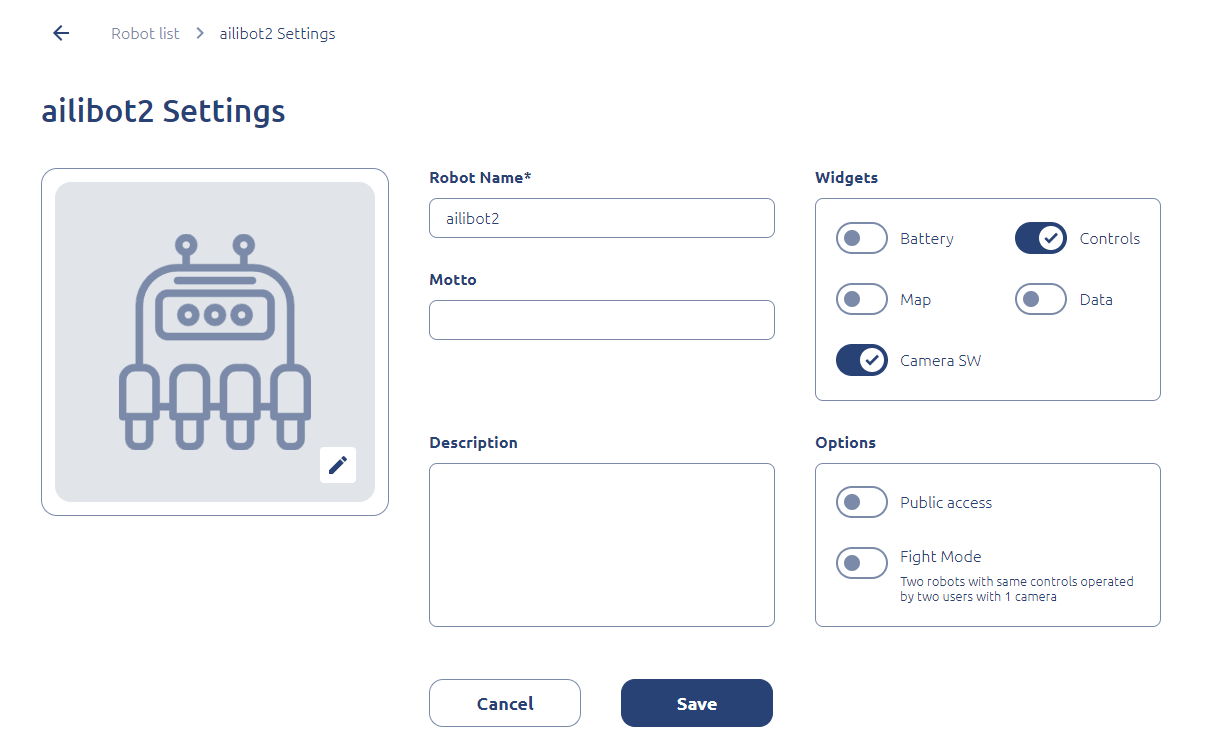
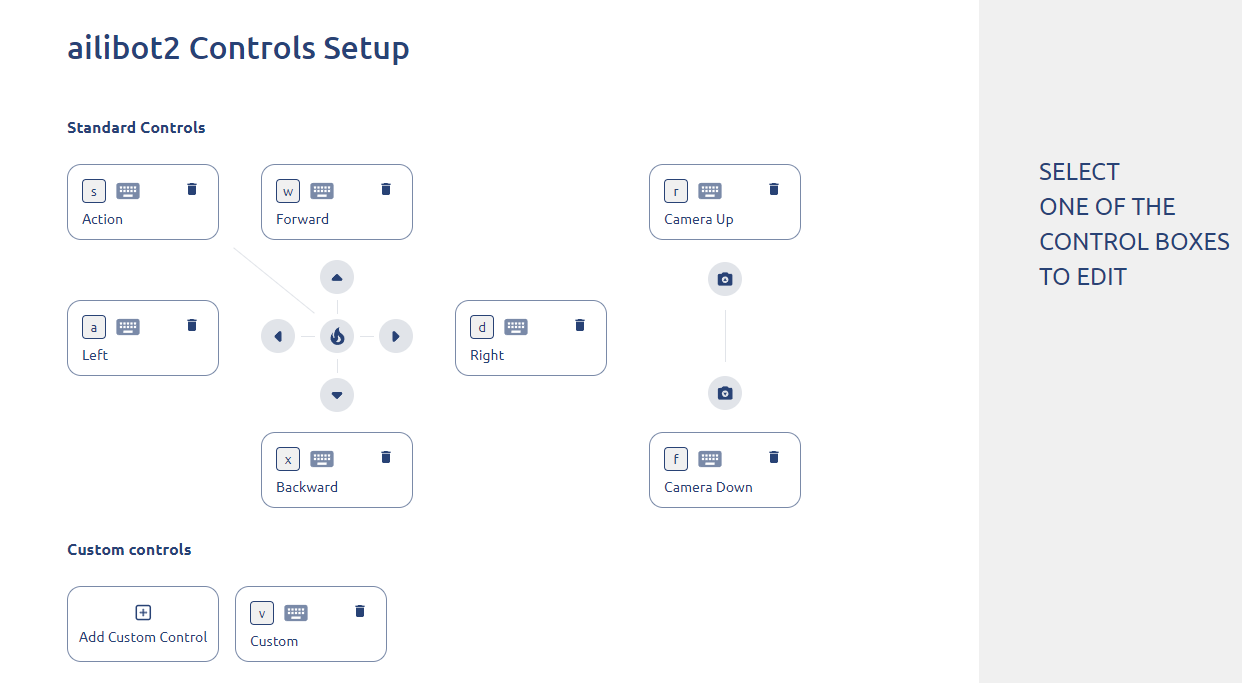
- 配置控制按键,点击每个控制图标,按键盘,再右侧显示配置键盘列表
- 小车端,检测摄像头是否安装并可用
$ vcgencmd get_camera
supported=1 detected=1
- 配置bot_box
- 从roboportal.io网站的获取

- 从上述图片点击public_key和secret_key复制对应内容
- 小车端,添加public_key和secret_key到.env文件
cd ~/tools/bot_box
cp .env_example .env
# 添加里面的内容
public_key = ""
secret_key = ""
output_mode = ipc
使用
- 小车端,启动bot_box
cd ~/tools/bot_box
./bot_box
- 顺利的话,从roboportal.io能看到已经连接的字样

- 点击机器人的LOGO进入具体控制界面

会显示摄像头界面,点击Enable controled,激活控制按钮
小车端,启动小车
ros2 launch ailibot2_bringup agent.launch.py
- 小车端,启动键盘webrtc控制
cd ~/ros2_ailibot2_ws/src/ailibot2/ailibot2_teleop/scripts
python3 teleop_webrtc.py
Receiving
Robot received {'start': True}
Robot received {'start': True}
- 控制摄像头界面上的控制按钮,即可控制小车移动,并查看小车摄像头
- 主要按键说明
w - 前进
x - 后退
a - 左转
d - 右转
s - 停止
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号