



















ROS2与Ailibot2入门教程-校准-IMU校准
说明:
- 介绍如何在Ailibot2上校准imu
- Ailibot2默认使用GY-85九轴陀螺仪
- IMU校准的作用减少IMU高敏感度带来的误差
- 小车默认已经校准,除非数据明显差异,否则跳过次步骤
原理
- 小车提供的是自定义的imu的原始值,经过校准后减少误差,再进行imu_filter_madgwick包进行滤波处理,得到一个带四元数方向值的完整的ros2的imu数据值,并发布imu数据到话题/imu/data。
相关设备:
- ailibot2差速系列:采购Ailibot2-D2,采购Ailibot2-D4
- ailibot2全向系列:采购Ailibot2-M4,采购Ailibot2-O3,采购Ailibot2-O4
操作步骤
- [小车] 启动底盘
ros2 launch ailibot2_bringup agent.launch.py
- [Ailibot] 开始校准imu,最终生成的配置文件默认保存在包
ailibot2_bringup/param/imu/文件夹里
$ ros2 run ailibot2_calib do_calib
......
Orient IMU with X+ axis - Front side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with X- axis - Rear side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Y+ axis - Left side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Y- axis - Right side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Z+ axis - Top side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Orient IMU with Z- axis - Bottom side of the robot facing up. Press [ENTER] once done.
Calibrating! This may take a while....
Done.
Computing calibration parameters... Success!
Saving calibration file... Success!
注:校准时需要根据终端上的提示来翻转小车;比如校准Y+方向的时候,将小车的左面朝上,z-方向就是底面朝上,等等,照此类推
- [Ailibot] 查看文件日期,检查是否生成新的
imu_calib.yaml配置文件
$ ll /home/ubuntu/ros2_ailibot2_ws/src/ailibot2/ailibot2_calib/param
- 确认校准的数据正确,将生成的imu_calib.yaml复制到/home/ubuntu/ros2_ailibot2_ws/src/ailibot2/ailibot2_bringup/param
$ cp /home/ubuntu/ros2_ailibot2_ws/src/ailibot2/ailibot2_calib/param/imu_calib.yaml /home/ubuntu/ros2_ailibot2_ws/src/ailibot2/ailibot2_bringup/param
- [Remote PC] 启动机器人生成里程
$ ros2 launch ailibot2_bringup robot.launch.py
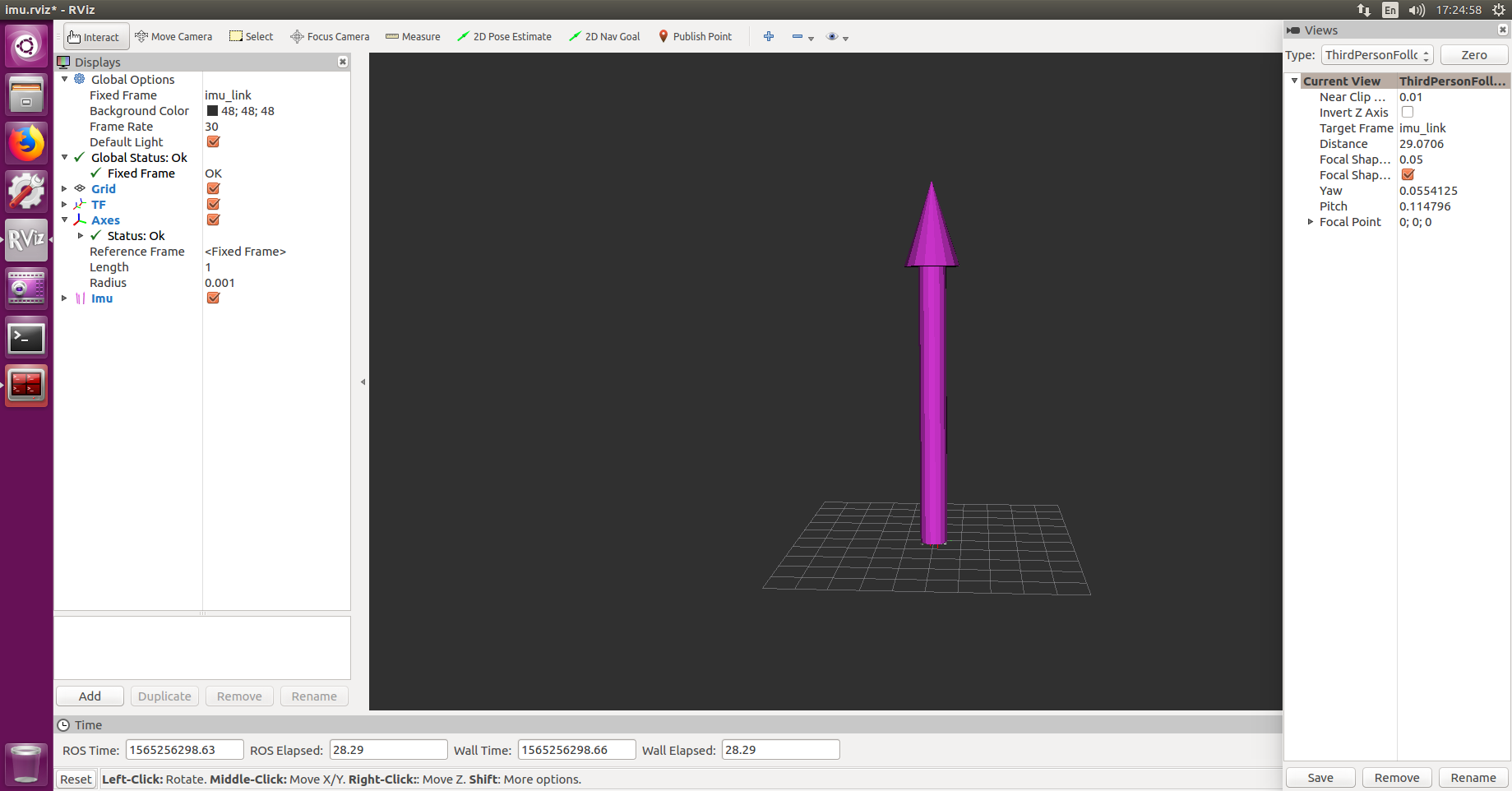
- [Remote PC] 打开rviz查看imu数据
$ ros2 launch ailibot2_bringup rviz2_imu.launch.py
正常情况下,imu数据较为稳定,不会有大幅度偏移
效果如下:
查看imu数据
1.查看原始来自小车的imu数据
- 数据发布在话题/raw_imu
$ ros2 topic echo /raw_imu
---
linear_acceleration:
x: 1.0346484375
y: 0.15328125
z: 9.8483203125
angular_velocity:
x: -0.06799194713043478
y: -0.015783844869565217
z: -0.015783844869565217
magnetic_field:
x: 2.392e-05
y: 1.4259999999999999e-05
z: -3.8731999999999994e-05
---
- /raw_imu话题发布的频率
$ ros2 topic hz /raw_imu
average rate: 38.516
min: 0.003s max: 0.048s std dev: 0.00812s window: 40
average rate: 38.716
min: 0.002s max: 0.052s std dev: 0.00846s window: 79
average rate: 38.567
min: 0.002s max: 0.052s std dev: 0.00872s window: 118
2.经过校准后的imu数据
- 经过校准后的imu数据,增加协方差数据,并采用ros2标准的imu格式
- 发布在话题/imu/data_raw
$ ros2 topic echo /imu/data_raw
---
header:
stamp:
sec: 1696812611
nanosec: 337837340
frame_id: imu_link
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
orientation_covariance:
- 0.0025
- 0.0
- 0.0
- 0.0
- 0.0025
- 0.0
- 0.0
- 0.0
- 0.0025
angular_velocity:
x: -0.0013962631999999836
y: 0.015261763846956516
z: -0.0006070709565217415
angular_velocity_covariance:
- 1.0e-06
- 0.0
- 0.0
- 0.0
- 1.0e-06
- 0.0
- 0.0
- 0.0
- 1.0e-06
linear_acceleration:
x: 0.643722012270846
y: 0.04275854132881131
z: 9.834792257029461
linear_acceleration_covariance:
- 0.0001
- 0.0
- 0.0
- 0.0
- 0.0001
- 0.0
- 0.0
- 0.0
- 0.0001
---
- /imu/data_raw发布的频率
$ ros2 topic hz /imu/data_raw
average rate: 38.959
min: 0.001s max: 0.070s std dev: 0.01033s window: 41
average rate: 38.522
min: 0.001s max: 0.070s std dev: 0.00933s window: 80
average rate: 38.698
min: 0.001s max: 0.070s std dev: 0.00869s window: 120
- 磁力计作为单独的话题,发布到/imu/mag
ros2 topic echo /imu/mag
---
header:
stamp:
sec: 1696812818
nanosec: 501811546
frame_id: imu_link
magnetic_field:
x: 2.3736000000000004e-05
y: 1.38e-05
z: -3.900800000000001e-05
magnetic_field_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
---
- /imu/mag的发布频率
$ ros2 topic hz /imu/mag
average rate: 39.433
min: 0.000s max: 0.293s std dev: 0.04919s window: 41
average rate: 38.778
min: 0.000s max: 0.293s std dev: 0.03534s window: 80
average rate: 38.935
min: 0.000s max: 0.293s std dev: 0.02892s window: 120
average rate: 38.807
min: 0.000s max: 0.293s std dev: 0.02534s window: 159
3. 经过filter_madgwick进行滤波处理的imu数据
- 经过滤波处理的imu数据,增加四元数方向值
- 发布到话题/imu/data
$ ros2 topic echo /imu/data
---
header:
stamp:
sec: 1696813140
nanosec: 65980297
frame_id: imu_link
orientation:
x: 0.02092601523280476
y: -0.02469429004034984
z: 0.5144051904860141
w: 0.8569361667749394
orientation_covariance:
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
angular_velocity:
x: -0.0013962631999999836
y: 0.012833480020869559
z: -0.003035354782608699
angular_velocity_covariance:
- 1.0e-06
- 0.0
- 0.0
- 0.0
- 1.0e-06
- 0.0
- 0.0
- 0.0
- 1.0e-06
linear_acceleration:
x: 0.644725909157287
y: 0.12006491677865708
z: 9.795341470850872
linear_acceleration_covariance:
- 0.0001
- 0.0
- 0.0
- 0.0
- 0.0001
- 0.0
- 0.0
- 0.0
- 0.0001
---
- /imu/data发布频率
$ ros2 topic hz /imu/data
average rate: 36.923
min: 0.013s max: 0.071s std dev: 0.00972s window: 39
average rate: 38.779
min: 0.001s max: 0.091s std dev: 0.01634s window: 80
average rate: 38.446
min: 0.001s max: 0.091s std dev: 0.01565s window: 119
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号