



















Ailibot仿真入门教程-设计简单的Gazebo场景
文章说明
- 本教程主要介绍如何在gazebo上设计新的gazebo场景
- 在Gazebo中设计场景涉及创建虚拟环境,包括地形、物体、传感器和光照等,以进行机器人仿真和测试
- 测试环境:Ubuntu 20.04 + Gazebo11
一般步骤:
启动Gazebo: 首先,确保你已经安装了Gazebo,并通过终端启动它:
创建新场景: 你可以从头开始创建新场景,也可以修改现有的场景。在Gazebo中,场景可以通过SDF(Simulation Description Format)文件进行描述。你可以手动创建SDF文件,或使用Gazebo提供的GUI工具来创建场景。
使用Gazebo GUI: Gazebo提供了一个图形用户界面,允许你通过可视化界面创建和编辑场景。你可以在“Insert”菜单中找到各种模型和物体,例如盒子、球体、机器人模型等。将它们拖放到场景中,然后调整其位置、大小和属性。
使用SDF文件: 如果你更喜欢手动编辑SDF文件来创建场景,可以按照Gazebo的SDF规范进行操作。SDF文件是XML格式的文件,描述了场景中的元素,如地形、模型、传感器等。
添加地形: 地形是场景的基础,可以通过高度图或其他方法创建。你可以在SDF文件中定义地形,也可以使用Gazebo GUI中的Terrain编辑器来创建。
添加模型和物体: 通过在场景中添加模型和物体,你可以模拟各种情境。例如,可以添加机器人模型、家具、建筑物等。在SDF文件中定义模型的几何形状、外观、碰撞属性等。
配置光照和天空: Gazebo支持对光照和天空进行配置,以使场景更加逼真。可以定义光源的位置、强度和颜色,以及天空的外观。
添加传感器: Gazebo允许你在场景中模拟传感器,如摄像头、激光雷达等。你可以将传感器附加到模型上,并在SDF文件中定义它们的属性和参数。
保存场景: 无论是通过GUI还是手动创建SDF文件,确保保存你的场景,以便以后加载和使用。
启动仿真: 一旦你设计完场景,你可以在Gazebo中启动仿真,观察模型的行为、物体的碰撞等情况。
具体操作
- 启动Gazebo: 首先,确保你已经安装了Gazebo,并通过终端启动它:
$ gazebo
2.创建新场景: 你可以从头开始创建新场景,也可以修改现有的场景。在Gazebo中,场景可以通过SDF(Simulation Description Format)文件进行描述。你可以手动创建SDF文件,或使用Gazebo提供的GUI工具来创建场景。
按下
ctrl+b打开模型编辑界面

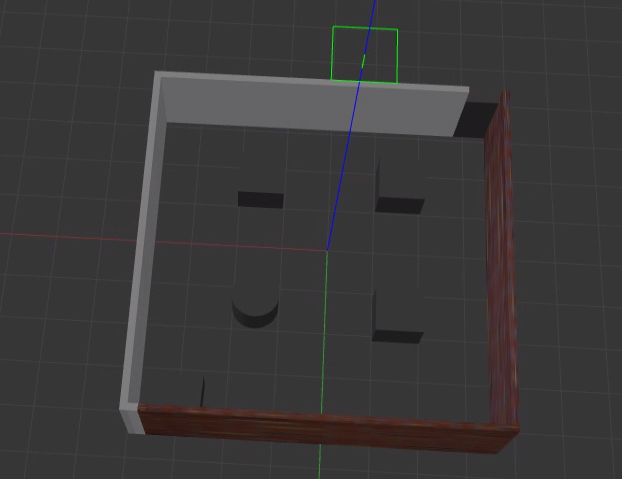
- 通过拖动侧边栏的
Wall到白色编辑框,此处简单围了7x8m的空间作为测试

可根据需要添加相应的特征
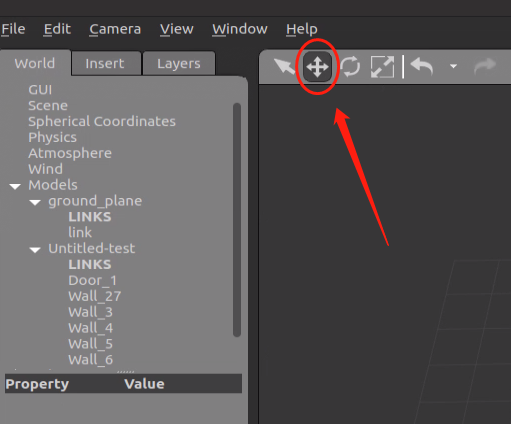
点击右上角
File->Save的按钮保存模型,同时退出模型编辑模式当前回到主界面,点击上方十字按钮可以移动模型
- 同时可添加一些简单的障碍
- 最后点击右上角
File->Save World As到ailibot_gazebo/worlds文件夹下,且命名为test.world
参考资料
- http://www.autolabor.com.cn/book/ROSTutorials/di-6-zhang-ji-qi-ren-xi-tong-fang-zhen/66-urdfji-cheng-gazebo/664-gazebofang-zhen-huan-jing-da-jian.html
- https://blog.csdn.net/qq_33742147/article/details/105437418
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号