



















Turtlebot4入门教程-设置Discovery Server
说明:
- 介绍如何在ROS2 humble中设置Discovery Server
步骤:
在create 3的设置:
下载最新的humble版本固件:https://iroboteducation.github.io/create3_docs/releases/overview/
本次测试使用的固件是:H.1.2
开机后,同时按下Create® 3按钮1和2,直到光环变为蓝色

Create® 3 现在处于AP模式,使用笔记本或手机连接到名为“Create-XXXX”的WiFi网络
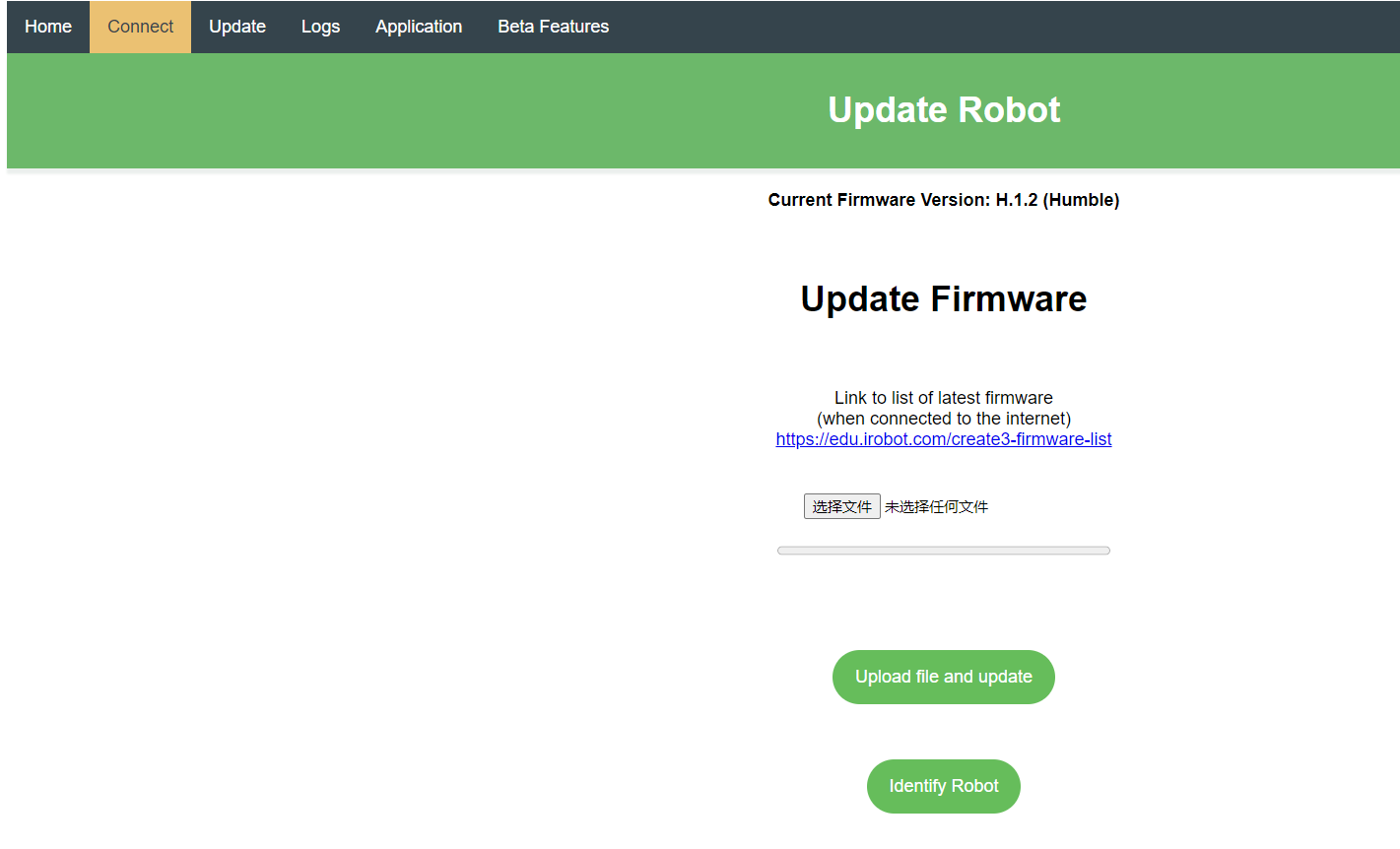
在浏览器中进入192.168.10.1的页面
点击左上面的菜单栏的
Update标签页点击
选择文件,选择对应的固件点击
Upload file and update,更新固件
更新完固件后,点击菜单栏的
About,在页面底部找到Factory Reset,点击它,执行恢复出厂设置,断开Create3与任何Wi-Fi网络的连接点击左上面的菜单栏的
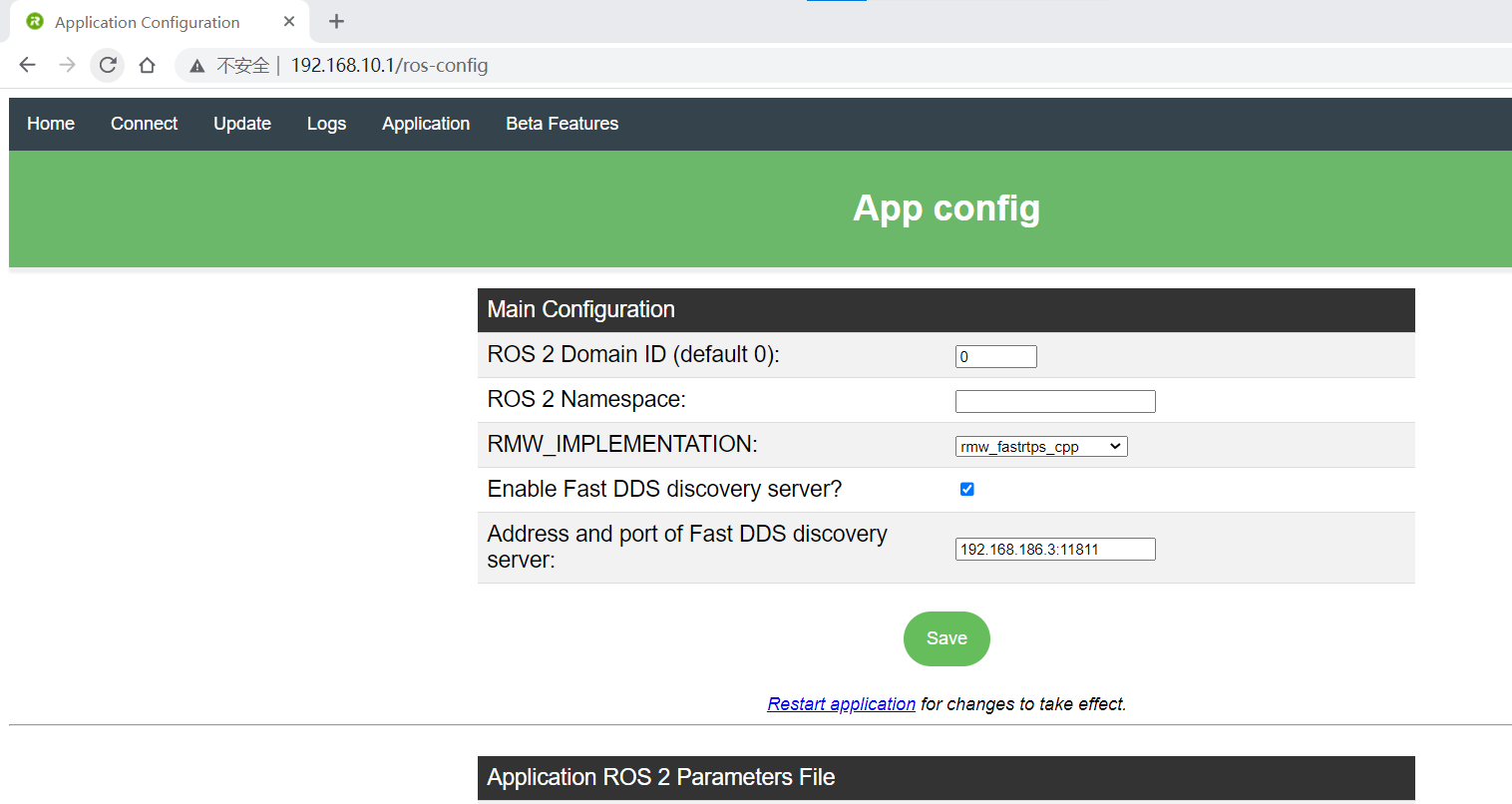
Application标签页点击选择
Configuration,配置RMW_IMPLEMENTATION设置为:rmw_fastrtps_cpp勾选
Enable Fast DDS discovery serverAddress and port of Fast DDS discovery server设置为:192.168.186.3:11811
turtlebot4 树莓派的设置:
启动树莓派
连接wifi时,需要手动在树莓派的桌面上连接wifi。不能使用turtlebot4-setup来设置wifi,要不然使用不了usb0网口
使用命令ifconfig查看一下网口信息,看一下是否有usb0网口
eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.185.3 netmask 255.255.255.0 broadcast 192.168.185.255
inet6 fe80::e65f:1ff:fe7d:5432 prefixlen 64 scopeid 0x20<link>
ether e4:5f:01:7d:54:32 txqueuelen 1000 (Ethernet)
RX packets 16781 bytes 11777494 (11.7 MB)
RX errors 0 dropped 4 overruns 0 frame 0
TX packets 2283 bytes 363248 (363.2 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536
inet 127.0.0.1 netmask 255.0.0.0
inet6 ::1 prefixlen 128 scopeid 0x10<host>
loop txqueuelen 1000 (Local Loopback)
RX packets 229595 bytes 296256792 (296.2 MB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 229595 bytes 296256792 (296.2 MB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
usb0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.186.3 netmask 255.255.255.0 broadcast 192.168.186.255
inet6 fe80::5475:35ff:fee2:81cf prefixlen 64 scopeid 0x20<link>
ether 56:75:35:e2:81:cf txqueuelen 1000 (Ethernet)
RX packets 5498754 bytes 1261814343 (1.2 GB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 15850 bytes 2570388 (2.5 MB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
wlan0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.0.210 netmask 255.255.255.0 broadcast 192.168.0.255
inet6 fe80::2dad:4ead:dd2c:f928 prefixlen 64 scopeid 0x20<link>
ether e4:5f:01:7d:54:33 txqueuelen 1000 (Ethernet)
RX packets 15605 bytes 10459690 (10.4 MB)
RX errors 0 dropped 1 overruns 0 frame 0
TX packets 362 bytes 106040 (106.0 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
- 看一下是否ping通create3
ping 192.168.186.2
PING 192.168.186.2 (192.168.186.2) 56(84) bytes of data.
64 bytes from 192.168.186.2: icmp_seq=1 ttl=64 time=0.406 ms
64 bytes from 192.168.186.2: icmp_seq=2 ttl=64 time=0.341 ms
64 bytes from 192.168.186.2: icmp_seq=3 ttl=64 time=0.639 ms
--- 192.168.186.2 ping statistics ---
3 packets transmitted, 3 received, 0% packet loss, time 2043ms
rtt min/avg/max/mdev = 0.341/0.462/0.639/0.127 ms
- 运行 TurtleBot 4 设置工具
turtlebot4-setup
_____ _ _ ___ _ _ _ ___ _
|_ _| _ _ _| |_| |___| _ ) ___| |_| | | / __| ___| |_ _ _ _ __
| || || | '_| _| / -_) _ \/ _ \ _|_ _| \__ \/ -_) _| || | '_ \
|_| \_,_|_| \__|_\___|___/\___/\__| |_| |___/\___|\__|\_,_| .__/
|_|
Press Q, Esc, or CTRL+C to go back.
---------------------------------------------------------------------
> ROS Setup
Wi-Fi Setup
Bluetooth Setup
View Settings
Apply Settings
About
Help
Exit
- 选择
ROS Setup
___ ___ ___ ___ _
| _ \/ _ \/ __| / __| ___| |_ _ _ _ __
| / (_) \__ \ \__ \/ -_) _| || | '_ \
|_|_\\___/|___/ |___/\___|\__|\_,_| .__/
|_|
Press Q, Esc, or CTRL+C to go back.
-----------------------------------------
Bash Setup
> Discovery Server
Robot Upstart
- 选择
Discovery Server
___ _ ___
| \(_)___ __ _____ _____ _ _ _ _ / __| ___ _ ___ _____ _ _
| |) | (_-</ _/ _ \ V / -_) '_| || | \__ \/ -_) '_\ V / -_) '_|
|___/|_/__/\__\___/\_/\___|_| \_, | |___/\___|_| \_/\___|_|
|__/
Press Q, Esc, or CTRL+C to go back.
----------------------------------------------------------------
> Enabled [True]
IP [127.0.0.1]
Port [11811]
Apply Defaults
Save
选择
Enabled为True选择
Save,按q退出上一层,再按q退出上一层,回到首页选择
Apply Settings打开终端,输入命令。让刚才的设置生效
turtlebot4-source
- 重启ROS2 daemon
turtlebot4-daemon-restart
- 查看话题
ros2 topic list
/battery_state
/cmd_audio
/cmd_lightring
/cmd_vel
/color/preview/image
/diagnostics
/diagnostics_agg
/diagnostics_toplevel_state
/dock_status
/function_calls
/hazard_detection
/imu
/interface_buttons
/ip
/ir_intensity
/ir_opcode
/joint_states
/joy
/joy/set_feedback
/kidnap_status
/mobility_monitor/transition_event
/mouse
/odom
/parameter_events
/robot_description
/robot_state/transition_event
/rosout
/scan
/slip_status
/static_transform/transition_event
/stereo/depth
/stop_status
/tf
/tf_static
/wheel_status
/wheel_ticks
/wheel_vels
- 看一下是否能查看电池状态的话题的数据信息
ros2 topic echo /battery_state
header:
stamp:
sec: 1684395660
nanosec: 227231811
frame_id: ''
voltage: 15.291999816894531
temperature: 47.95000076293945
current: 0.48899999260902405
charge: 1.309000015258789
capacity: 1.9520000219345093
design_capacity: 1.9520000219345093
percentage: 0.6700000166893005
power_supply_status: 0
power_supply_health: 0
power_supply_technology: 0
present: true
cell_voltage: []
cell_temperature: []
location: ''
serial_number: ''
---
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号