



















OpenManipulator-P机械臂入门教程-实现AR识别抓放物体
说明
介绍在OpenManipulator机械臂运行AR识别抓放物体示例
测试设备: OpenManipulator机械臂 + U2D2驱动板 + Intel D435i相机
前提准备
- 安装相关包
sudo apt-get install ros-kinetic-ar-track-alvar ros-kinetic-ar-track-alvar-msgs ros-kinetic-image-proc
cd ~/openManipulator_ws/src
git clone https://github.com/ROBOTIS-GIT/open_manipulator_perceptions.git
cd ~/openManipulator_ws&& catkin_make
也可以根据教程:OpenManipulator机械臂入门教程-相机应用来安装相机和AR标签的驱动包
准备三个贴着AR标签的立方体或其他物体
- 下图为测试时所用的物体

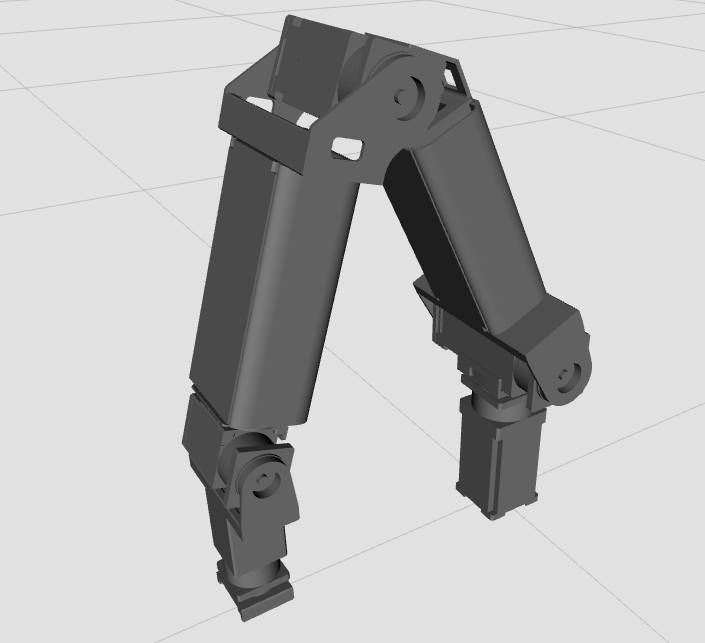
- 启动机械臂前请将机械臂手动设置以下姿势,以避免启动后出现无法控制的问题
操作步骤
- 启动相机以及AR标签识别;
camera_model为相机类型,user_marker_size为AR标签的大小
$ roslaunch open_manipulator_ar_markers ar_pose.launch camera_model:=realsense_d435 user_marker_size:=3.5
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号