



















OpenManipulator-P机械臂入门教程-MoveIt!控制
说明
- 通过MoveIt!来控制OpenManipulator机械臂
安装相关包
- 如果没有安装相关包,可以进行安装
- 安装命令
$ cd ~/ros1_op_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_p_controls.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_dependencies.git
$ cd ~/ros1_op_ws && catkin_make
操作步骤
- 建议启动机械臂前请将机械臂手动设置以下姿势,以避免启动后出现无法控制的问题
- 启动机械臂和MoveIt!
roslaunch open_manipulator_p_controllers joint_trajectory_controller.launch sim:=false
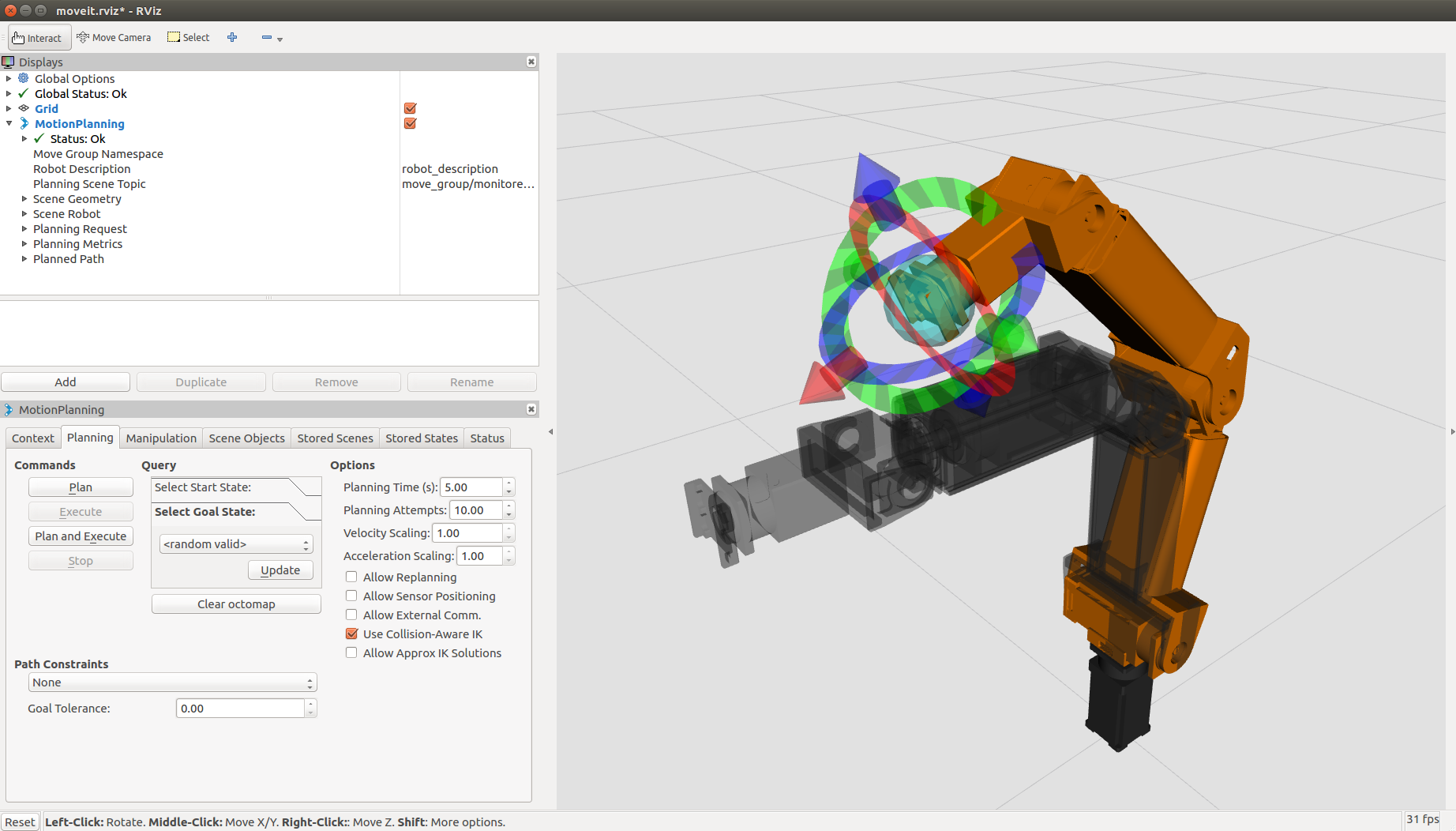
- 默认启动为仿真模式
roslaunch open_manipulator_p_controllers joint_trajectory_controller.launch
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号