



















Turbot3入门教程#ROS2版#-网络设置与远程控制
文章说明
本教程介绍如何进行网络设置以及远程控制
操作前请准备好键盘、鼠标和显示器
相关设备
- TurBot3机器人套件:采购地址
设置固定IP
使用TurBot3时,最好设置固定的IP地址以免出现DHCP模式分配其不同IP地址的情况
TurBot3主机接上键鼠和显示屏后,按照下面使用教程来配置网络
远程控制
远程控制有两种方式:
ssh和远程桌面- 依照上面教程设置完固定IP后,就可以在另外同一wifi网段的PC上使用
ssh或远程桌面登录到TurBot3上
- 依照上面教程设置完固定IP后,就可以在另外同一wifi网段的PC上使用
ssh示例
# ssh [用户名]@[IP地址]
# 密码为 ubuntu
$ ssh ubuntu@192.168.0.20
远程桌面
- 默认情况下TurBot3主机已经装好
nomachine软件,现只需在用户自己的电脑上安装nomachine软件即可
第一步:下载并安装nomachine软件
nomachine软件官网下载地址:https://downloads.nomachine.com/
window下点击安装包安装即可,Ubuntu下则使用
sudo dpkg -i命令来进行安装
$ sudo dpkg -i nomachine_x.x.x_xxx.deb
第二步:确认小车IP
- 需要小车接入显示屏,键盘,鼠标,开机进入系统后,连上wifi
- 再执行命令:
ifconfig,获取相应的IP地址,假设当前档期IP地址为:192.168.0.111
第三步:连入
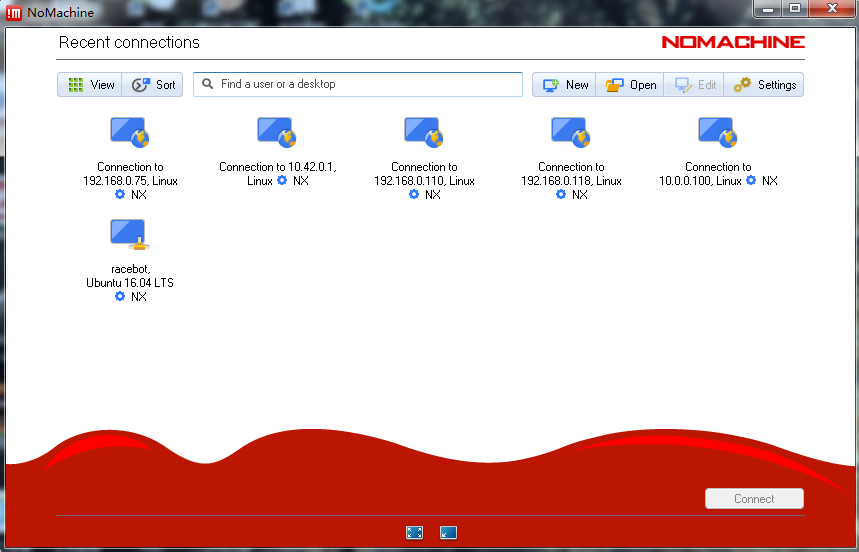
- pc上启动nomachine,点击New
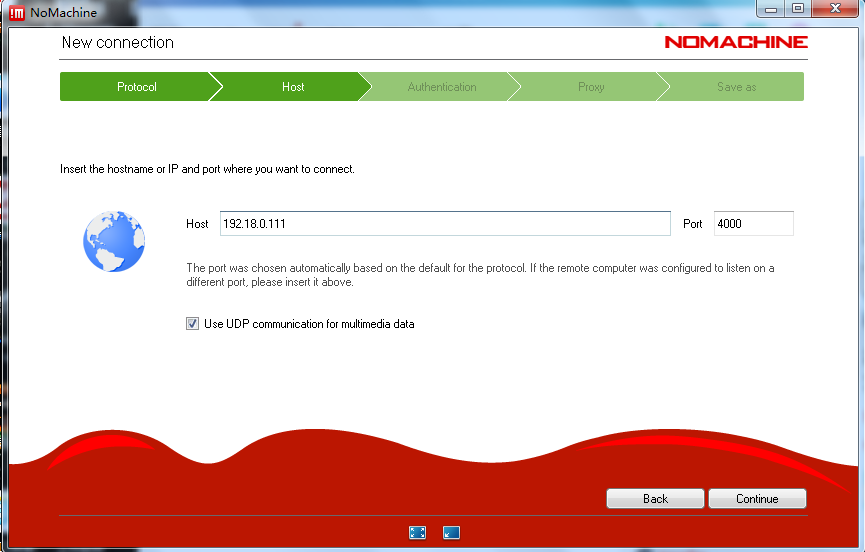
- 选择协议,默认即可,使用nx
- 选择主机,输入192.168.0.111

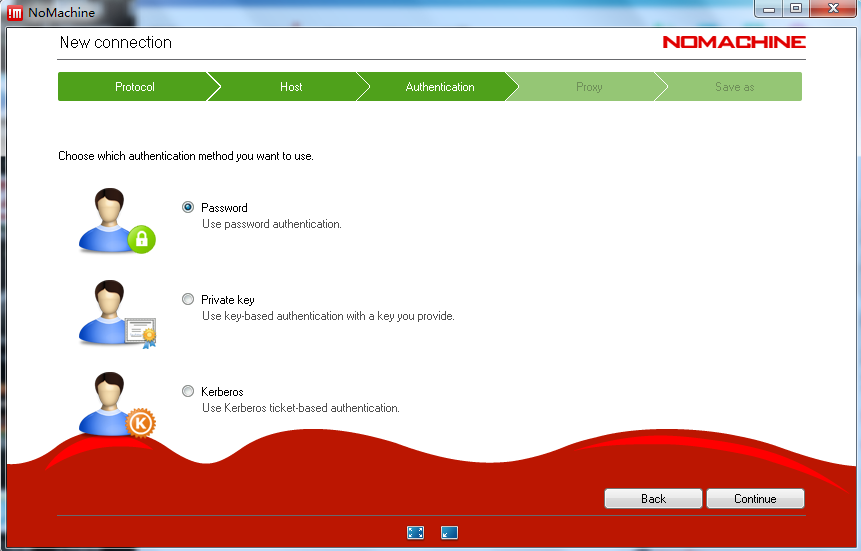
- 选择认证方式,默认即可
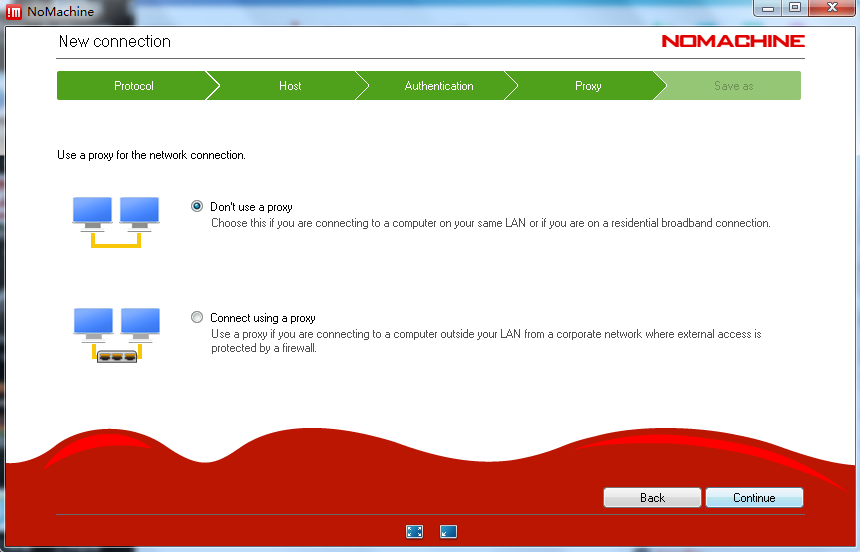
- 选择是否使用代理,默认即可
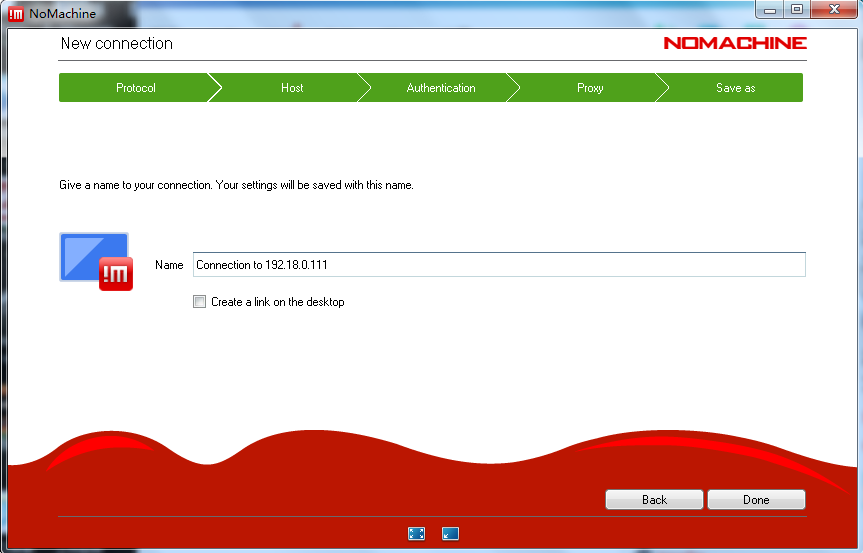
- 保存名称,默认即可,或者输入合适的名称
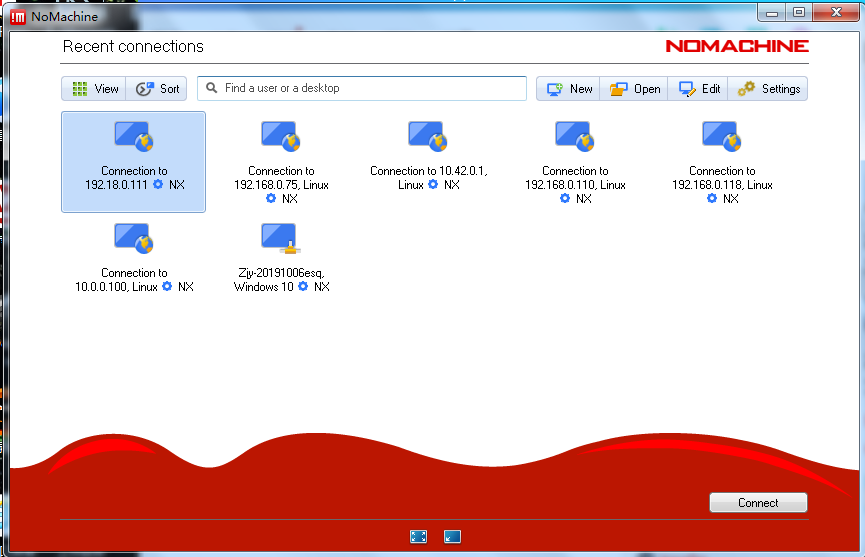
- 完成之后,即可生成可启动的连接
- 点击连接,一步步按照提示,再输入账号和密码,即可进入系统

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号