



















ros2与turtlebot3仿真教程-自主探索建图
ros2与turtlebot3仿真教程-自主探索建图
说明:
- 介绍如何实现turtlebot3仿真自主探索建图
- 测试环境:ubuntu22.04 + humble
步骤:
- 安装ros2,参考文章ros2与turtlebot3仿真教程-安装ros2
- 安装turtlebot3仿真,ros2与turtlebot3仿真教程-安装turtlebot3
- 通过RCM安装multirobot_map_merge
rcm -s install_multirobot_map_merge
测试
- 启动仿真建图
export TURTLEBOT3_MODEL=waffle
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/${ROS_DISTRO}/share/turtlebot3_gazebo/models
ros2 launch nav2_bringup tb3_simulation_launch.py slam:=True
- rviz效果图:
- 启动自主探索
ros2 launch explore_lite explore.launch.py
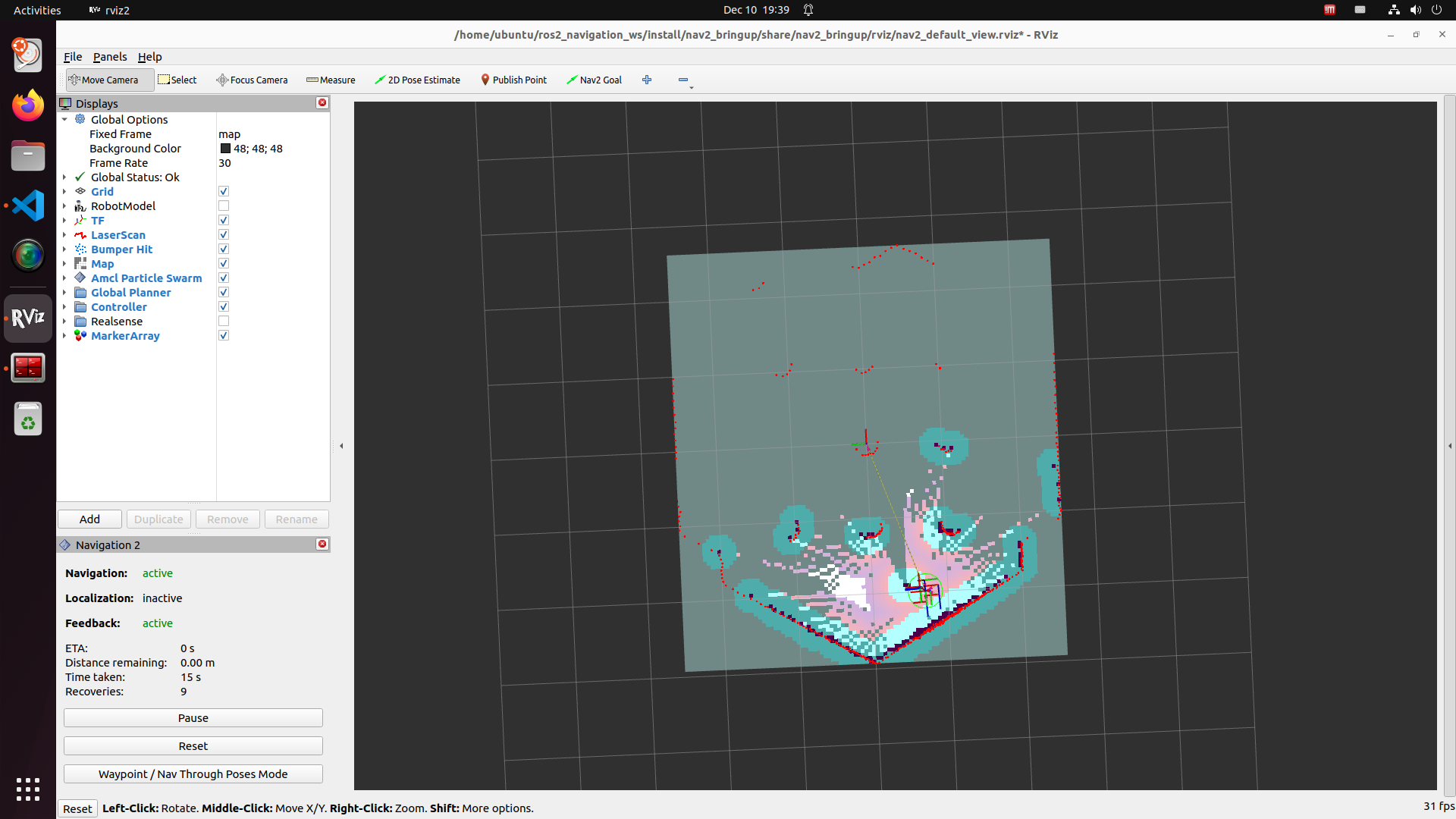
- 执行后,会自动进行探索并完成建图
- rviz效果图

参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号