



















ROS2与Open-RMF仿真教程-使用rmf_burger_maps进行仿真导航
ROS2与Open-RMF仿真教程-使用rmf_burger_maps进行仿真导航
说明:
- 接上一个教程,继续进行仿真导航
- 介绍如何利用rmf_burger_maps导航仿真包进行仿真导航
- 环境: ubuntu22.04 + humble + rmf22.09
步骤:
cs -s install_rmf_burger_maps
- 启动导航包
source ~/ros2_rmf_map_ws/install/local_setup.bash
ros2 launch rmf_burger_maps burger.launch.xml server_uri:="ws://localhost:7878"
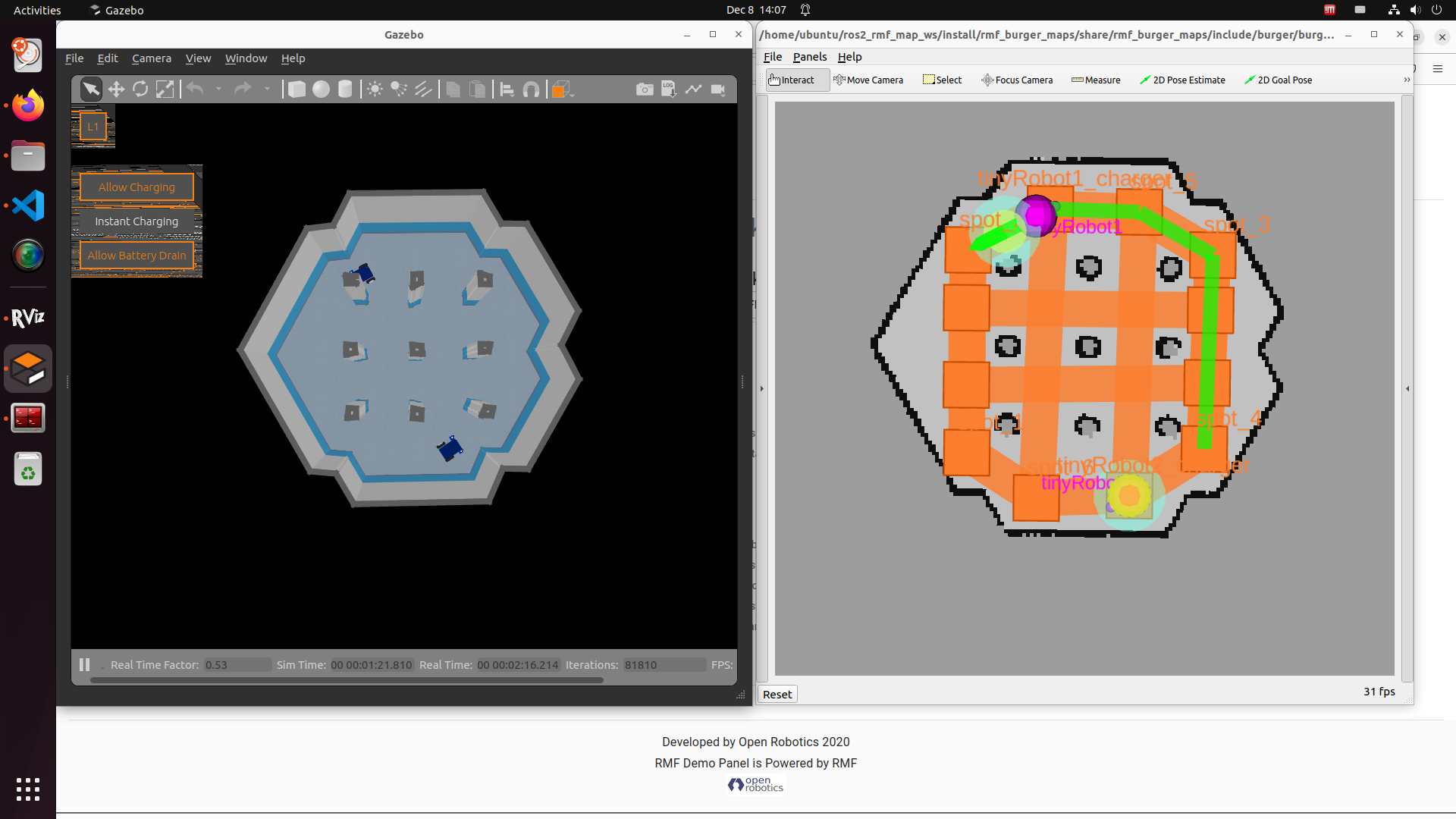
- gazebo效果图:

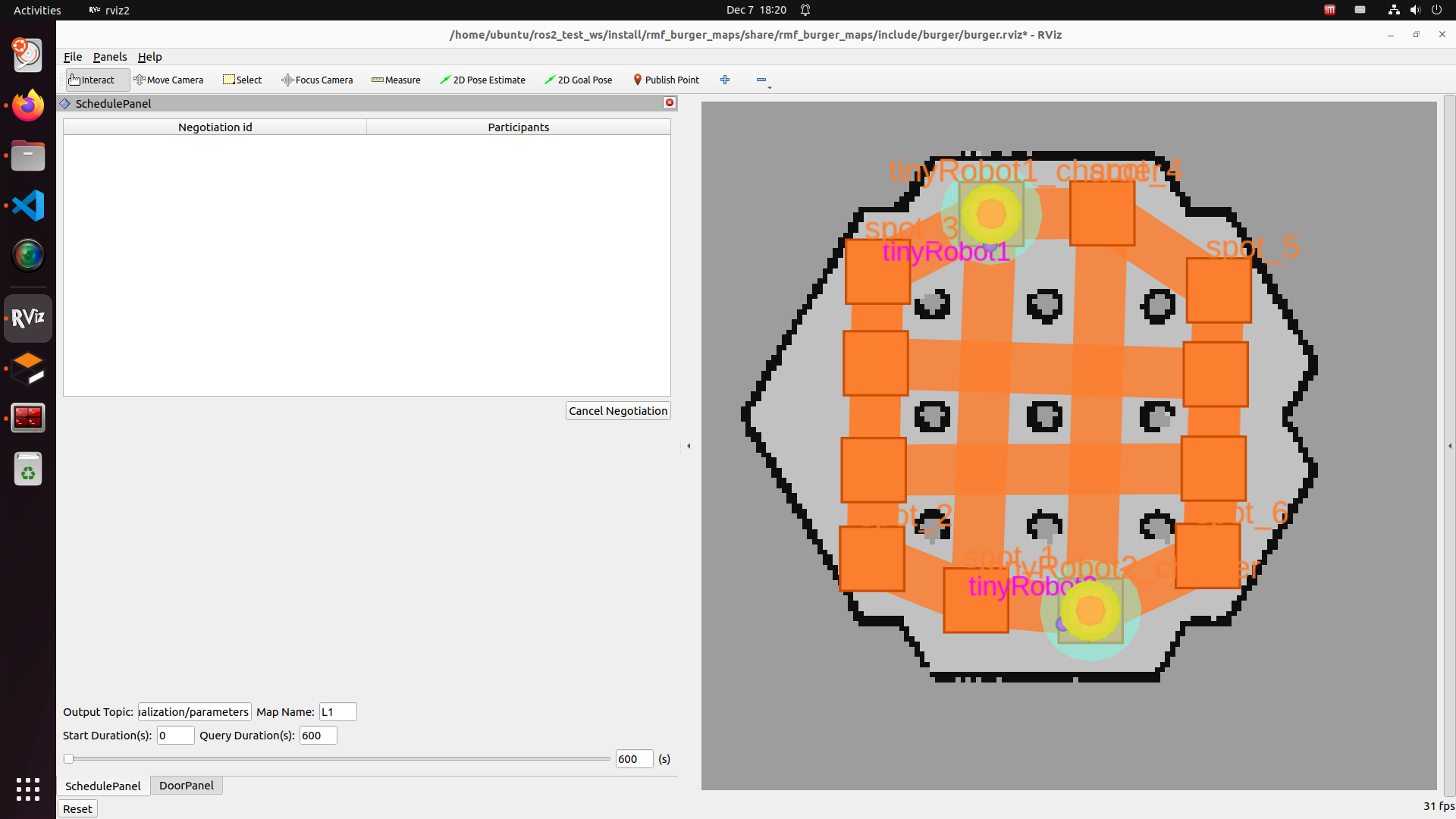
- rviz效果图:
- 启动panel服务器
cd ~/ros2_rmf_ws/rmf_panel
./load_http.sh
- 打开浏览器,输入http://localhost:3000
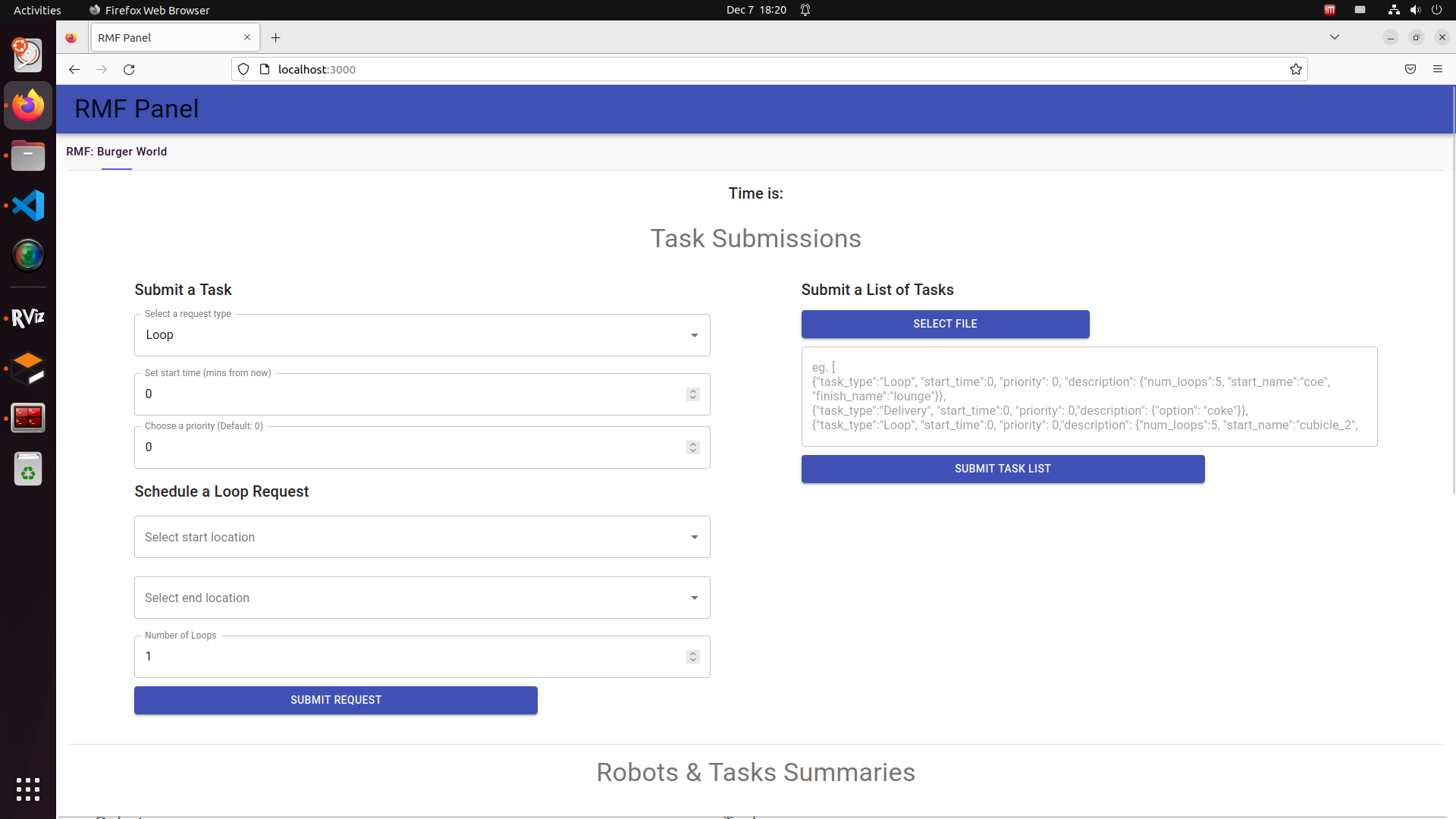
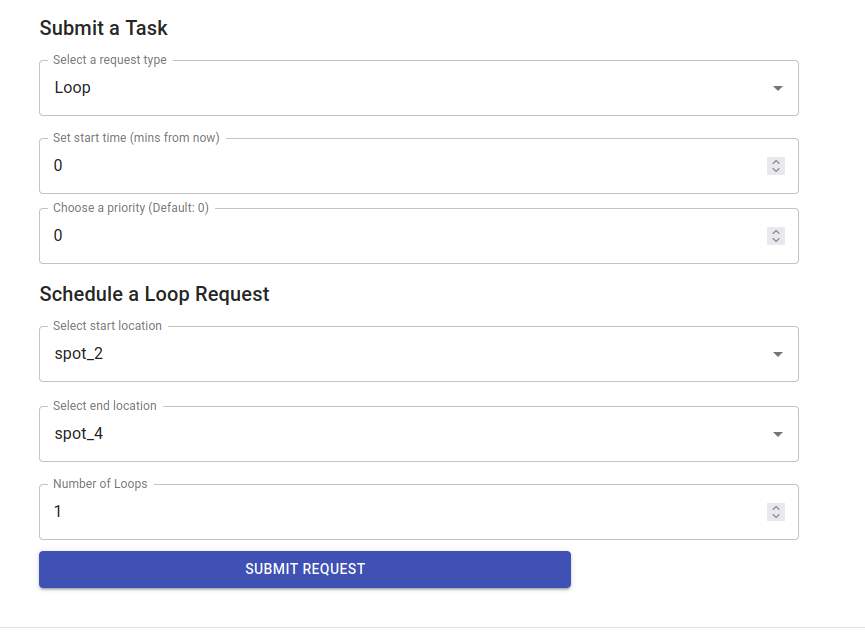
- 效果图1:
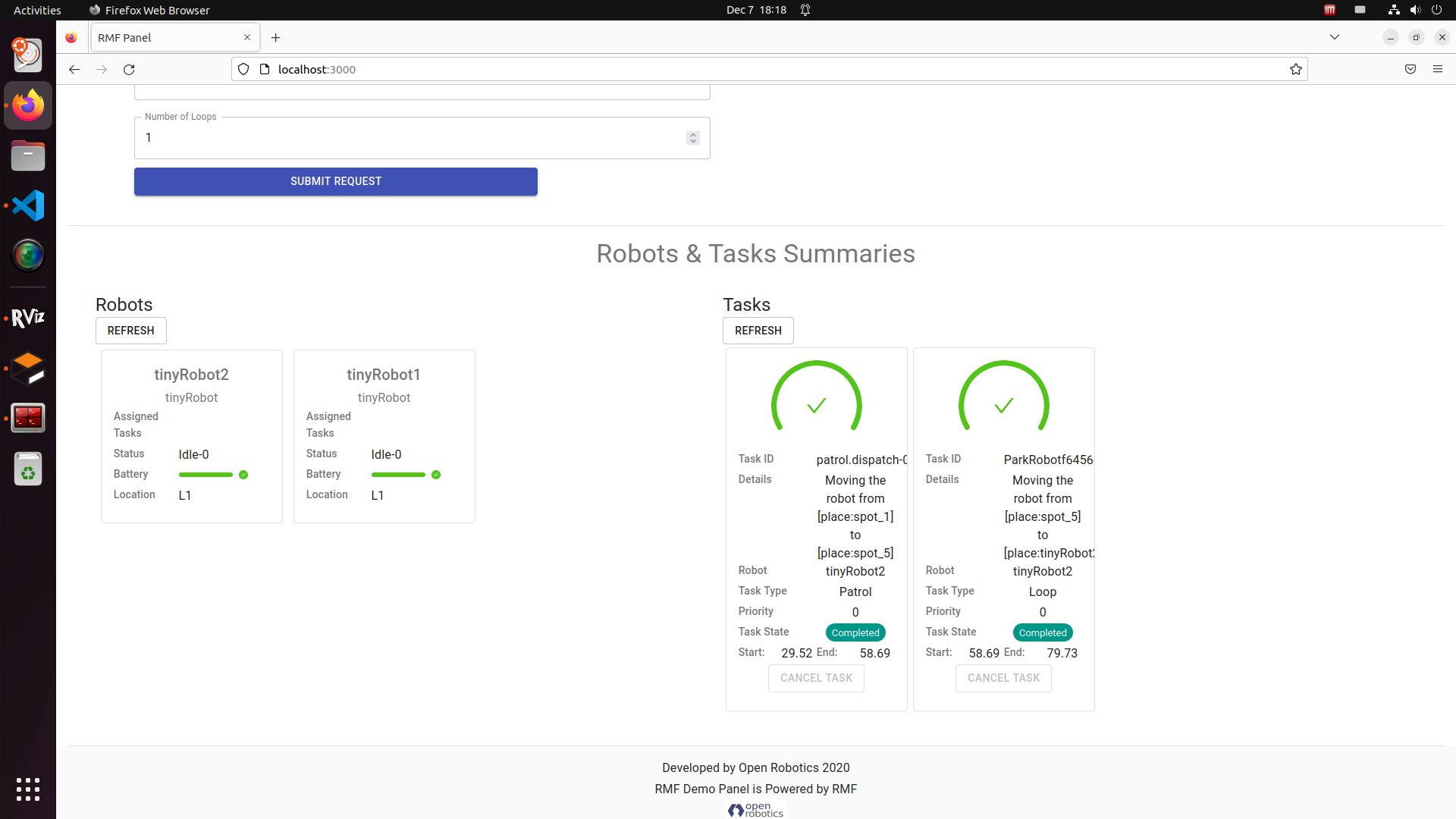
- 效果图2:
任务:
- 设置spot_1到spot_5之间巡逻
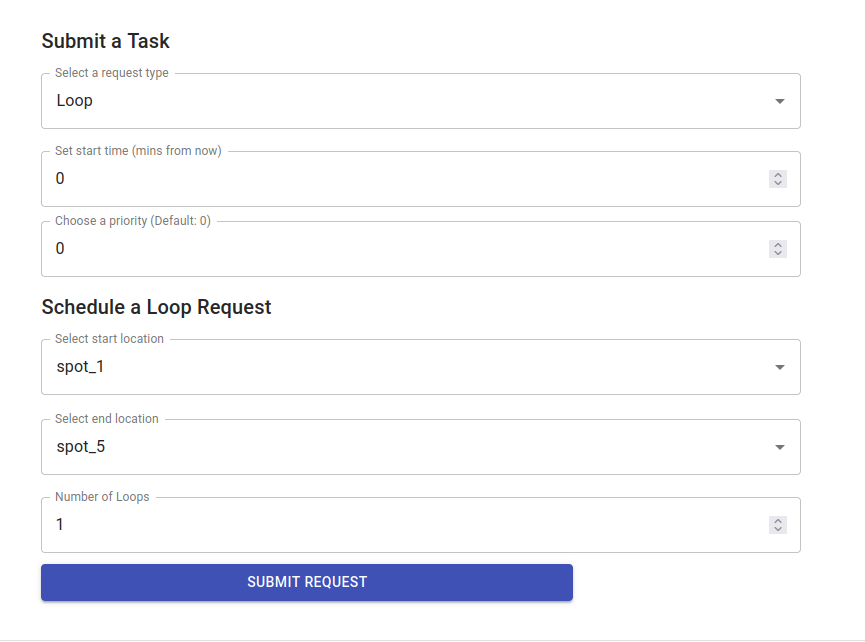
- 设置spot_2到spot_4之间巡逻
- 通过rviz和gazebo查看执行情况
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号