



















PythonRobotics机器人算法库-直方图滤波器定位
说明:
介绍如何使用直方图滤波器定位
步骤:
过滤器初始化
直方图过滤器不需要初始位置信息。
在那种情况下,我们可以将每个网格概率初始化为相同的值。
如果我们可以使用初始位置信息,我们可以根据它设置初始概率。
当初始位置信息作为高斯分布提供时,高斯网格图可能很有用。
通过运动预测概率
在直方图滤波器中,当机器人移动到下一个格子时,每个格子的所有概率信息都向运动方向移动。
这个过程代表了机器人移动时概率分布的变化。
机器人运动后,概率分布需要反映运动引起的估计误差。
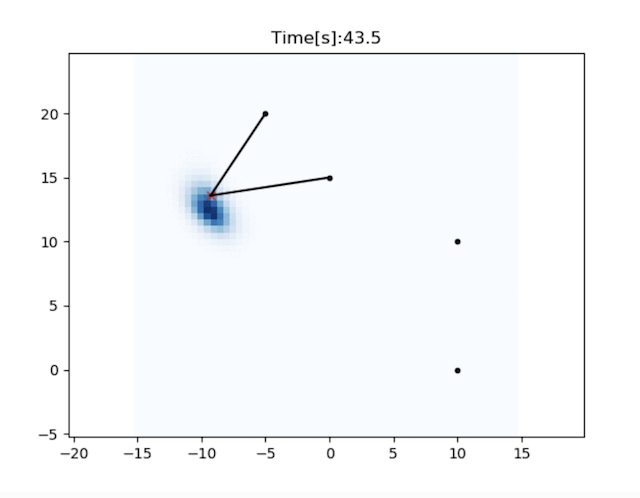
例如,位置概率在观察时达到峰值:
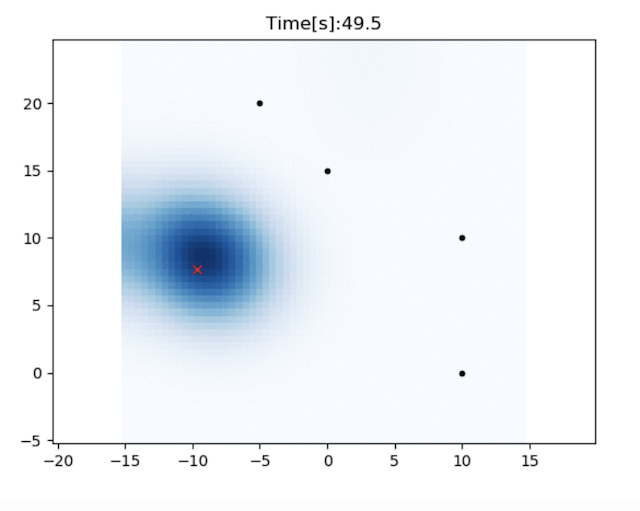
- 但是,如果没有观察,概率会变得不确定:
- 高斯滤波器 在模拟中用于添加噪声。
通过观察更新概率
在这一步中,所有的概率都通过观察更新,这就是贝叶斯滤波器的更新步骤。
概率更新公式因使用的传感器型号而异。
本次模拟采用距离观测模型。
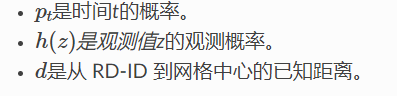
每个格子的概率通过这个公式更新:
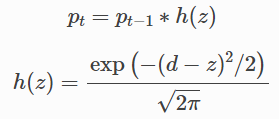
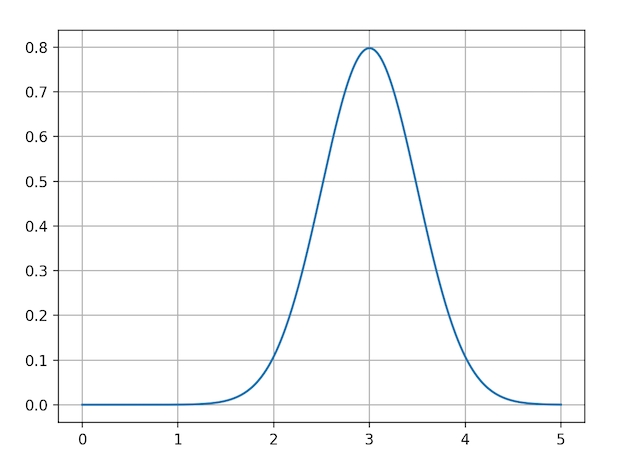
- 当d为 3.0 时,h(z)分布为:
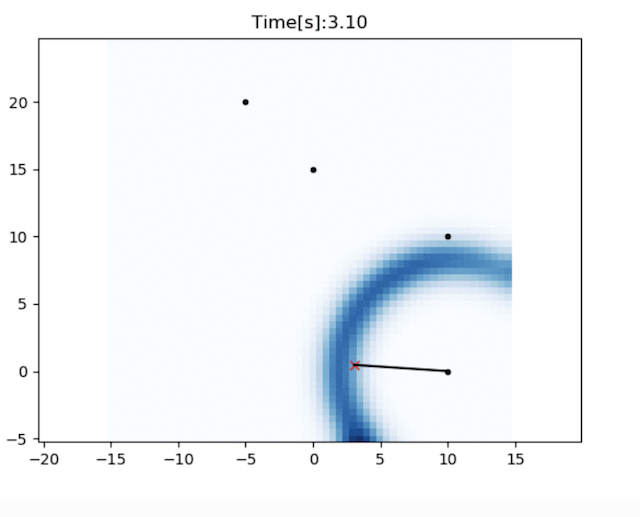
- 当观察到 RF-ID 时,观察概率分布看起来像一个圆圈:
根据概率估计位置
在每个时间步中,我们可以根据当前的概率分布计算出最终的机器人位置。有两种计算最终位置的方法:
使用最大概率网格位置。
使用概率加权研磨位置的平均值
测试运行
进入目录PythonRobotics/Localization/histogram_filter
执行文件
python3 histogram_filter.py
红十字是真实位置,黑点是 RFID 位置
蓝色网格显示直方图过滤器的位置概率
效果图

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号