



















ROS2与Open-RMF仿真教程-Triple-H场景(21.09版)
ROS2与Open-RMF仿真教程-Triple-H场景(21.09版)
说明:
- 介绍Triple-H场景的演示,测试交通灯类机器人暂停和恢复功能
演示:
- 启动仿真
ros2 launch rmf_demos_gz triple_H.launch.xml
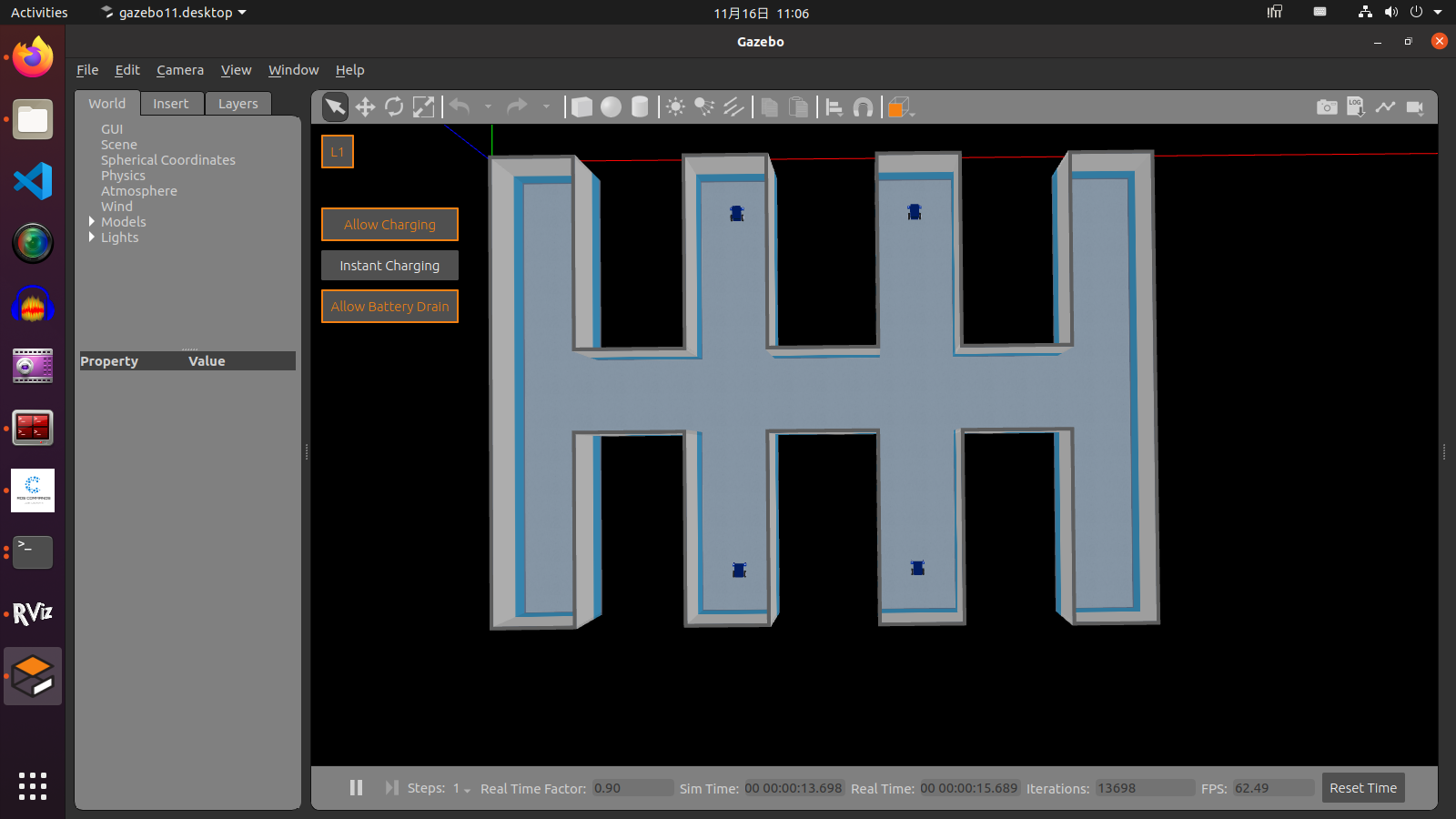
- gazebo效果图:
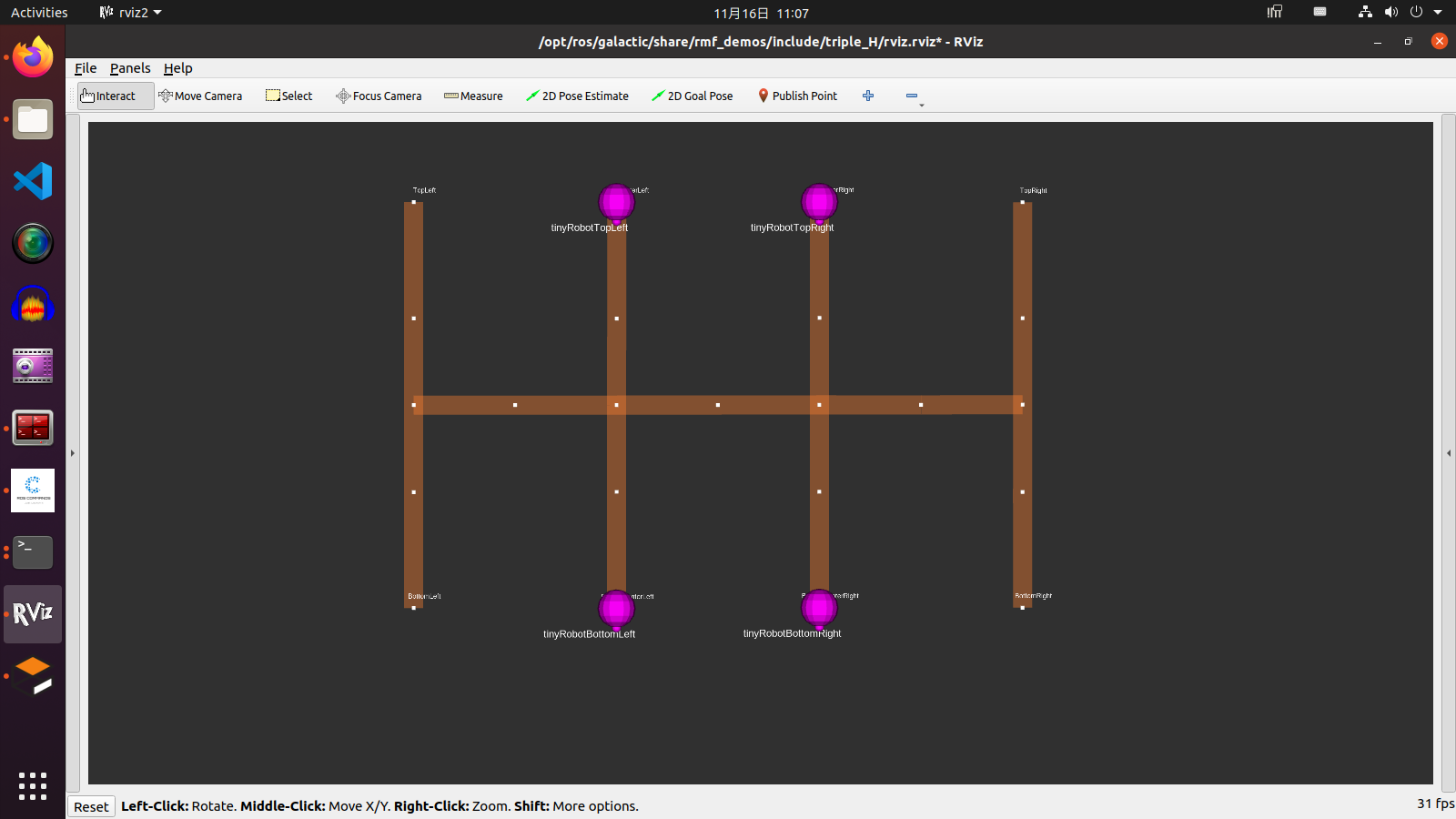
- rviz效果图:
执行任务
- 启动命令
ros2 launch rmf_demos the_pedigree.launch.xml
参考:
- https://github.com/open-rmf/rmf_demos
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号