



















ROS2与Open-RMF仿真教程-Clinic World/诊所世界(21.09版)
ROS2与Open-RMF仿真教程-Clinic World/诊所世界(21.09版)
说明:
- 介绍Clinic World/诊所世界的演示场景
Clinic World/诊所世界
- 这是一个有两层和两部机器人升降机的诊所世界。
- 两个具有不同角色的不同机器人车队通过升降机在两个层次上导航。
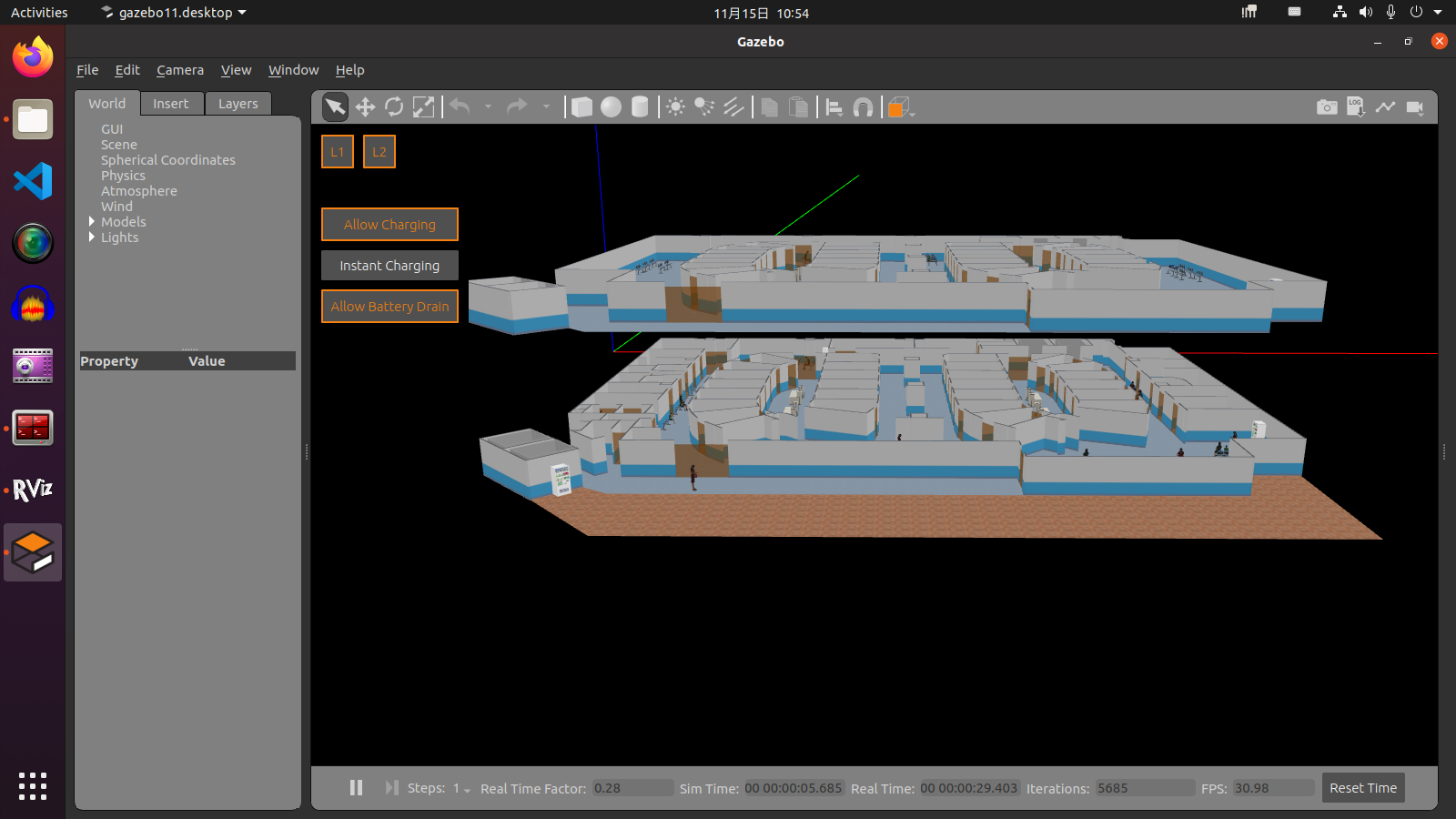
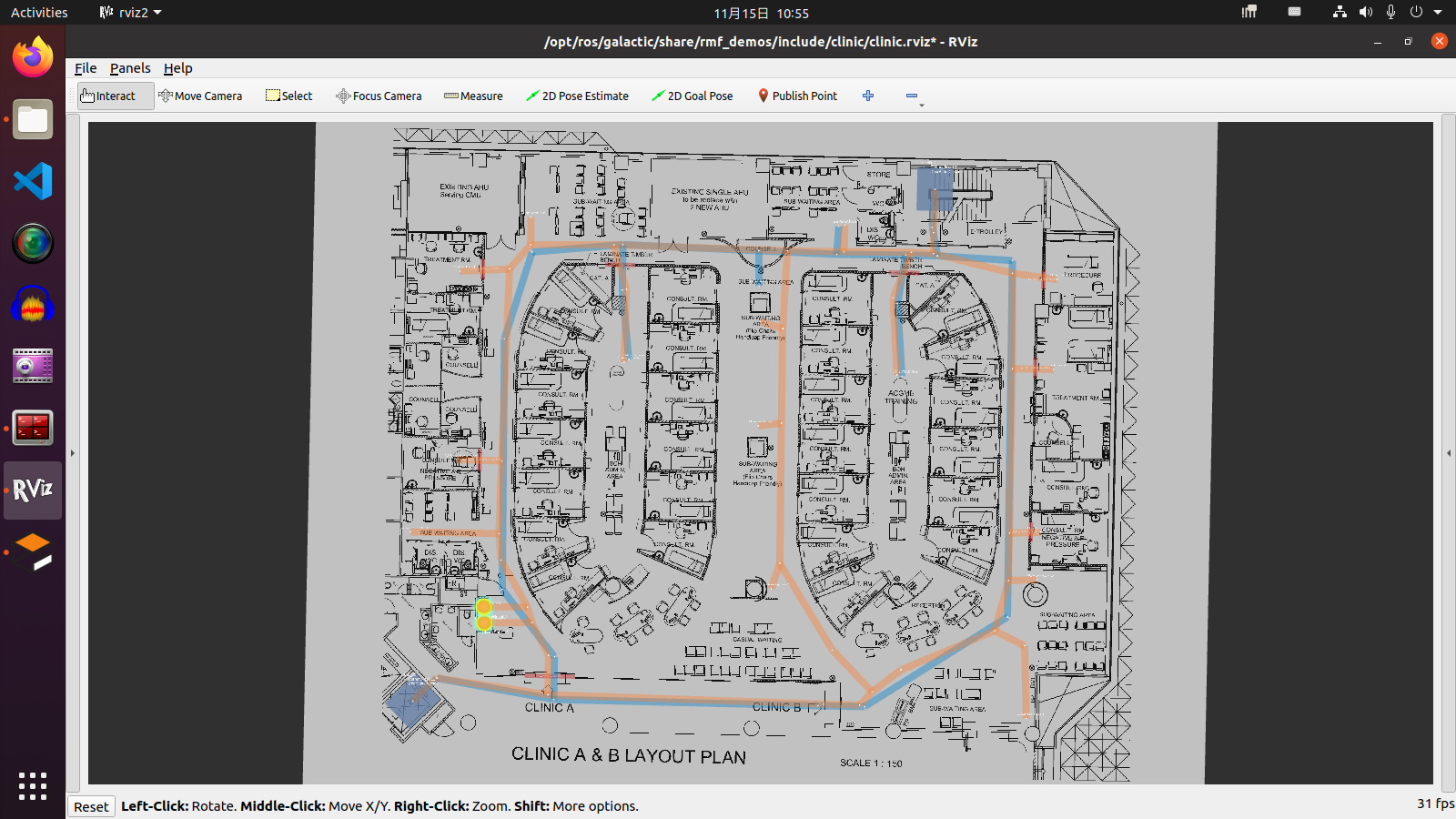
- 在下面的插图中,我们在 traffic_editor(左上)中查看了级别 1,在 rviz(右)中查看了时间表可视化器,在 Gazebo(左下)中查看了完整的模拟。
演示:
- 启动仿真
ros2 launch rmf_demos_gz clinic.launch.xml
- gazebo效果图:
- rviz效果图:
命令行执行任务
- loop任务
ros2 run rmf_demos_tasks dispatch_loop -s L1_left_nurse_center -f L2_right_nurse_center -n 5 --use_sim_time
- clean任务
ros2 run rmf_demos_tasks dispatch_clean -cs zone_1 --use_sim_time
面板执行任务:
- 启动面板
cd ~/ros2_rmf_ws/rmf-panel-js/
./load_http.sh
打开浏览器访问http://localhost:3000
单任务提交
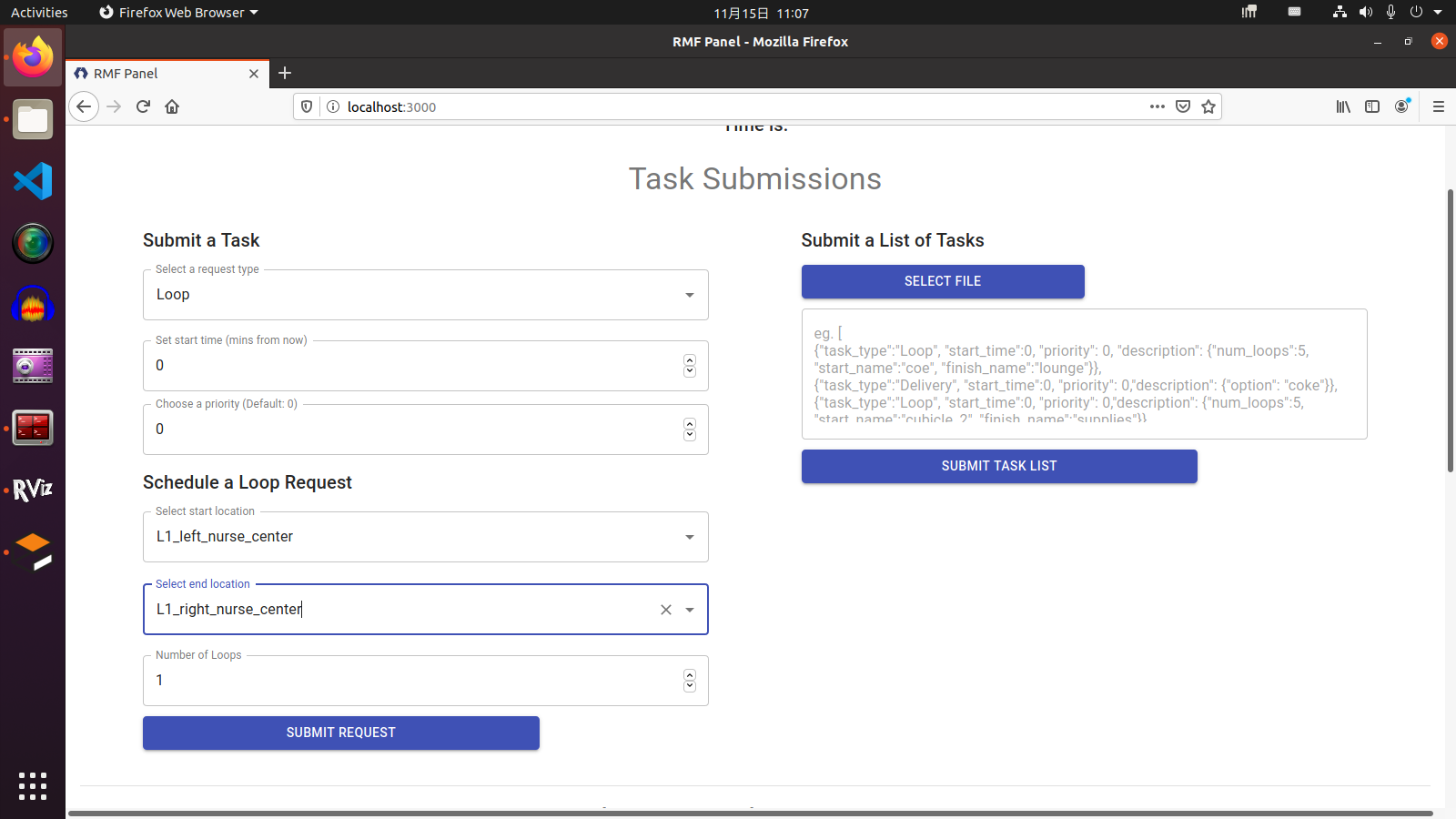
- 打开 RMF 面板以提交请求
- 同样对于Loop任务,Type选择Loop,然后从请求类型下拉列表中选择开始和结束位置。
- 同样对于clean任务,Type选择clean,然后从请求类型下拉列表中选择所需的清洁区域。
rviz1效果图:
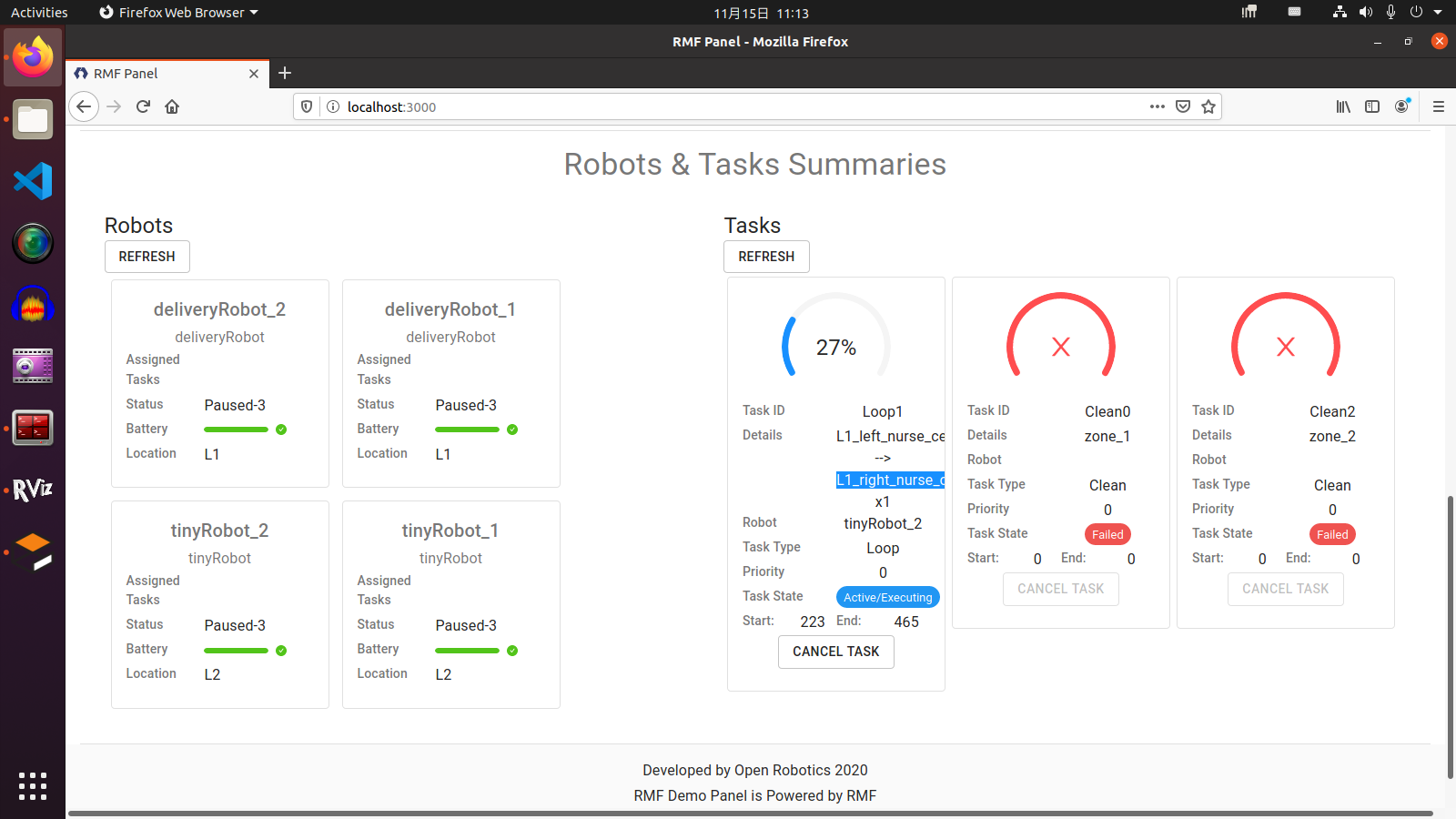
- rviz2效果图:
任务列表方式
- 提交clinic_tasks.json
- clinic_tasks.json位于~/ros2_rmf_ws/src/demonstrations/rmf_demos_panel/task_lists
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号