



















ROS2与Open-RMF仿真教程-安装Open-RMF(galactic版)
ROS2与Open-RMF仿真教程-安装Open-RMF(galactic版)
说明:
- 介绍如何安装Open-RMF
- 环境:ubuntu20.04 + galacitc
- ubuntu 20.04 galactic apt安装的版本为21.09版本,最新为galactic版本
- 要安装这个版本,需要使用源码安装
Open-RMF:
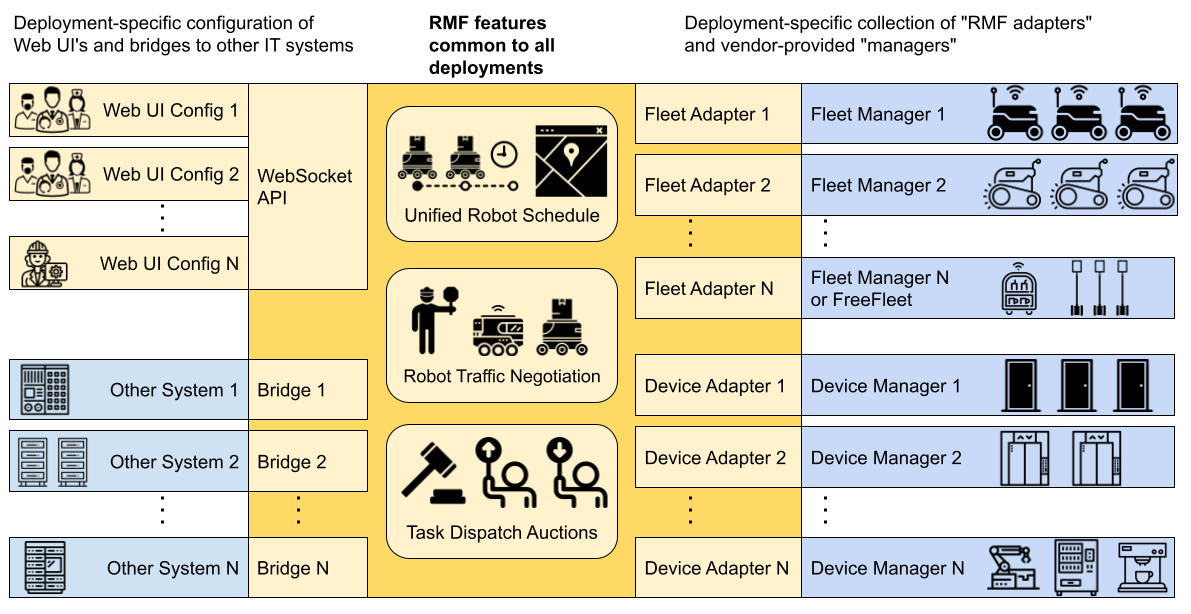
- Open-RMF是一个异构多智能体协同调度系统,用于协调不同机器人车队进行不同任务管理的可视化管理系统
- 架构图
源码步骤:
- 添加gazebo源
sudo apt update
sudo apt install -y wget
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
- 添加依赖
sudo apt update && sudo apt install \
git cmake python3-vcstool curl \
qt5-default \
-y
python3 -m pip install flask-socketio -y
sudo apt-get install python3-colcon* -y
- 安装rosdep
#如果rosdep已安装,只需要update一下,没安装则先安装
#sudo apt install python3-rosdep
#sudo rosdep init
rosdep update
- 编译rmf_ws
mkdir -p ~/ros2_rmf_ws/src
cd ~/ros2_rmf_ws
wget https://ghproxy.com/https://github.com/open-rmf/rmf/blob/galactic/rmf.repos
- 编辑rmf.repos
- 因为默认地址都是基于github,国内需要加一个代理, 自行增加代理
- 文件里面的https://github.com前增加
vim ~/ros2_rmf_ws/rmf.repos
- 效果如下:
repositories:
rmf/rmf_battery:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_battery.git
version: galactic-devel
rmf/rmf_internal_msgs:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_internal_msgs.git
version: galactic-devel
rmf/rmf_api_msgs:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_api_msgs.git
version: galactic-devel
rmf/rmf_ros2:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_ros2.git
version: galactic-devel
rmf/rmf_task:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_task.git
version: galactic-devel
rmf/rmf_traffic:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_traffic.git
version: galactic-devel
rmf/rmf_utils:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_utils.git
version: galactic-devel
rmf/ament_cmake_catch2:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/ament_cmake_catch2.git
version: galactic-devel
rmf/rmf_visualization:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_visualization.git
version: galactic-devel
rmf/rmf_visualization_msgs:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_visualization_msgs.git
version: galactic-devel
rmf/rmf_building_map_msgs:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_building_map_msgs.git
version: galactic-devel
rmf/rmf_simulation:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_simulation.git
version: galactic-devel
rmf/rmf_traffic_editor:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_traffic_editor.git
version: galactic-devel
demonstrations/rmf_demos:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/rmf_demos.git
version: galactic-devel
thirdparty/menge_vendor:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/menge_vendor.git
version: master
thirdparty/nlohmann_json_schema_validator_vendor:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/nlohmann_json_schema_validator_vendor.git
version: main
thirdparty/pybind11_json_vendor:
type: git
url: https://ghproxy.com/https://github.com/open-rmf/pybind11_json_vendor.git
version: main
thirdparty/ros_ign:
type: git
url: https://ghproxy.com/https://github.com/ignitionrobotics/ros_ign.git
version: galactic
- 下载源码
vcs import src < rmf.repos
- 下载依赖
cd ~/ros2_rmf_ws
rosdep install --from-paths src --ignore-src --rosdistro galactic -y
- 编译
cd ~/ros2_rmf_ws
source /opt/ros/galactic/setup.bash
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
参考:
- https://github.com/open-rmf/rmf/tree/release/21.09
- https://osrf.github.io/ros2multirobotbook/intro.html
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号