



















TurtleBot4快速入门教程-自动充电(含视频)
TurtleBot4快速入门教程-自动充电
说明:
本教程主要介绍如何使用命令行启动和底盘按钮启动方式让TB4进行自动充电操作
TB4实现自动充电实现有以下三种方式:命令行启动、底盘按钮启动和手柄控制
相关设备
- TurtleBot4机器人套件:采购地址
操作步骤
执行自动充电操作时,TB4与充电桩的距离过远则无法进行自动充电
据测试,机器人与充电桩的距离在1米左右时,TB4能稳定接收到充电桩的红外信号
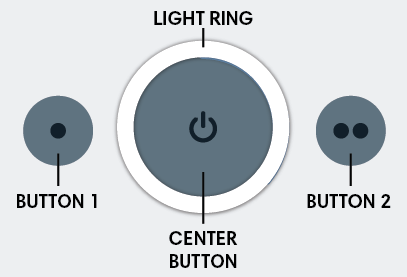
使用底盘按钮启动自动充电
按下开关键旁的
1按钮,TB4会执行自动充电操作;按下开关键旁的2按钮,TB4会执行脱离充电桩操作
使用命令行启动自动充电
[Remote PC] 查看/dock话题内容
$ ros2 topic echo /dock
header:
stamp:
sec: 1660797682
nanosec: 847721287
frame_id: ''
dock_visible: false
is_docked: true
dock_visible参数为在启动自动充电程序时,是否找到充电桩is_docked参数为是否已与充电桩对接[Remote PC] 启动自动充电程序
$ ros2 action send_goal /dock irobot_create_msgs/action/DockServo "{}" #galactic
$ ros2 action send_goal /dock irobot_create_msgs/action/Dock "{}" #humble
- [Remote PC] 启动脱离充电桩程序
$ ros2 action send_goal /undock irobot_create_msgs/action/Undock "{}"
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号