



















TurtleBot4快速入门教程-异步建图(含视频)
TurtleBot4快速入门教程-异步建图
说明:
- 本教程介绍如何使用TB4进行slam_toolbox的异步建图
- 异步建图主要是在处理器可以处理的范围内以最快的速度更新地图,故适合于在性能相对较弱的树莓派上使用
相关设备
- Turtlebot4机器人套件:采购地址
操作步骤
- [Remote PC] 启动异步建图
$ ros2 launch turtlebot4_navigation slam.launch.py sync:=false #humble
$ ros2 launch turtlebot4_navigation slam_async.launch.py #galactic
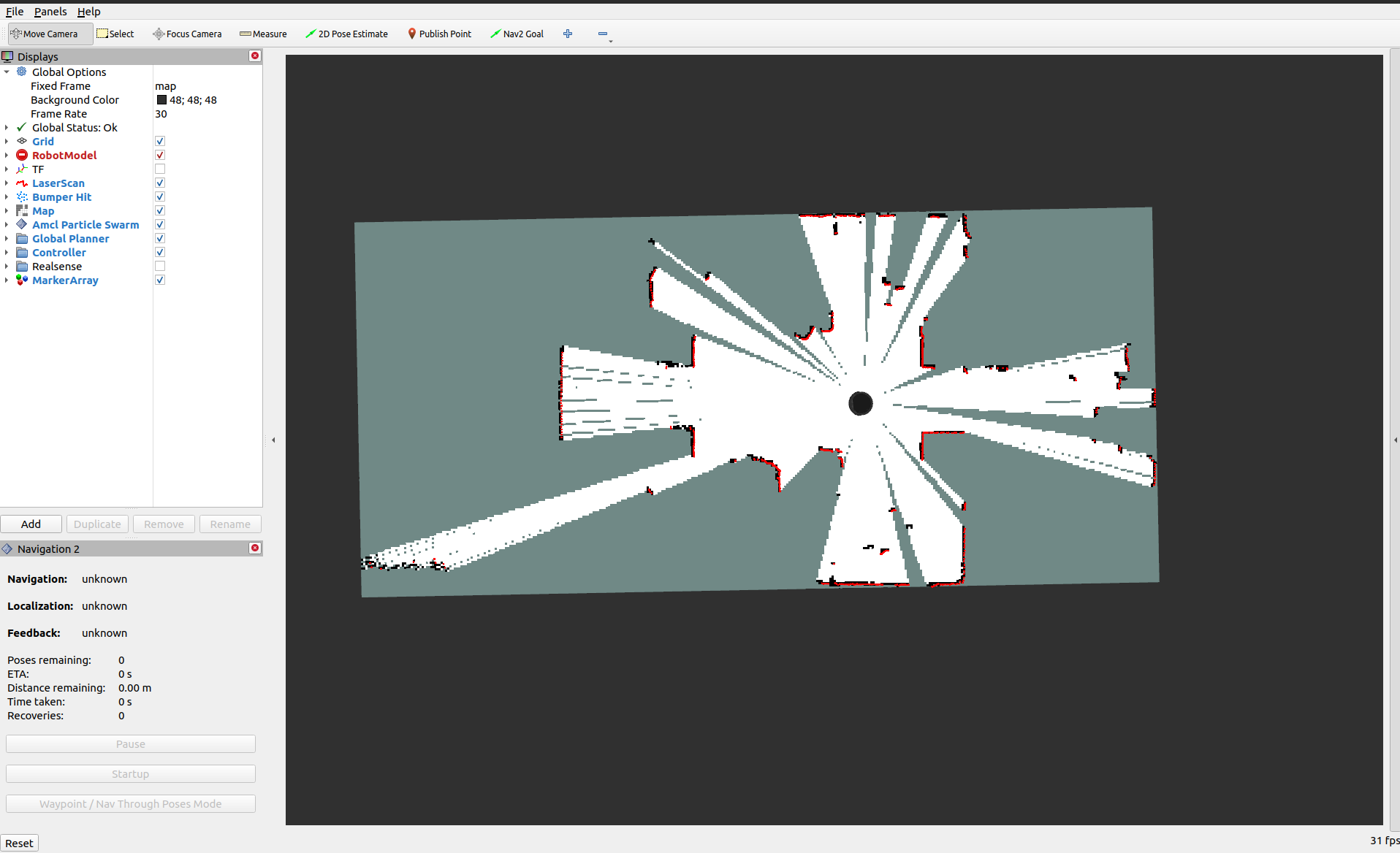
- [Remote PC] 启动可视化界面
$ ros2 launch turtlebot4_viz view_robot.launch.py
- [Remote PC] 启动键盘控制
$ ros2 run teleop_twist_keyboard teleop_twist_keyboard

- [Remote PC] 保存地图,这将生成
map_name.yaml和map_name.pgm文件
$ ros2 run nav2_map_server map_saver_cli -f map
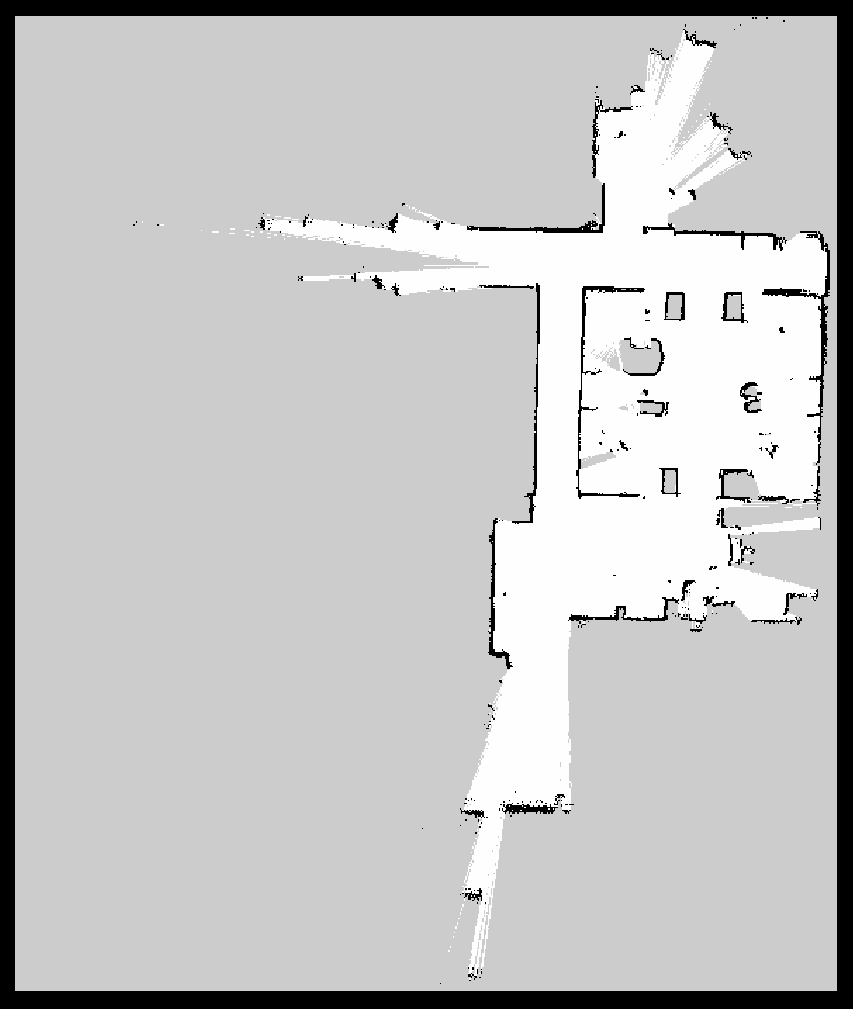
- [Remote PC] 查看生成的地图
$ eog ~/map_name.pgm
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号