



















Turtlebot4快速入门教程-A1激光雷达检测(含视频)
Turtlebot4快速入门教程-A1激光雷达检测
说明:
- 本教程主要介绍如何检测A1激光雷达
相关设备
- TurtleBot4机器人套件:采购地址
操作步骤
默认情况下,TB4会开机自启动A1雷达的ROS程序,不需要重复启动
[Remote PC] 查看雷达话题数据
$ ros2 topic echo /scan
header:
stamp:
sec: 1660106182
nanosec: 676067364
frame_id: rplidar_link
angle_min: -3.1241393089294434
angle_max: 3.1415927410125732
angle_increment: 0.008714509196579456
time_increment: 0.00018747818830888718
scan_time: 0.13479681313037872
range_min: 0.15000000596046448
range_max: 12.0
ranges:
- .inf
- .inf
- .inf
- .inf
- .inf
- .inf
- .inf
...
- [Remote PC] 启动可视化界面
$ ros2 launch turtlebot4_viz view_model.launch.py
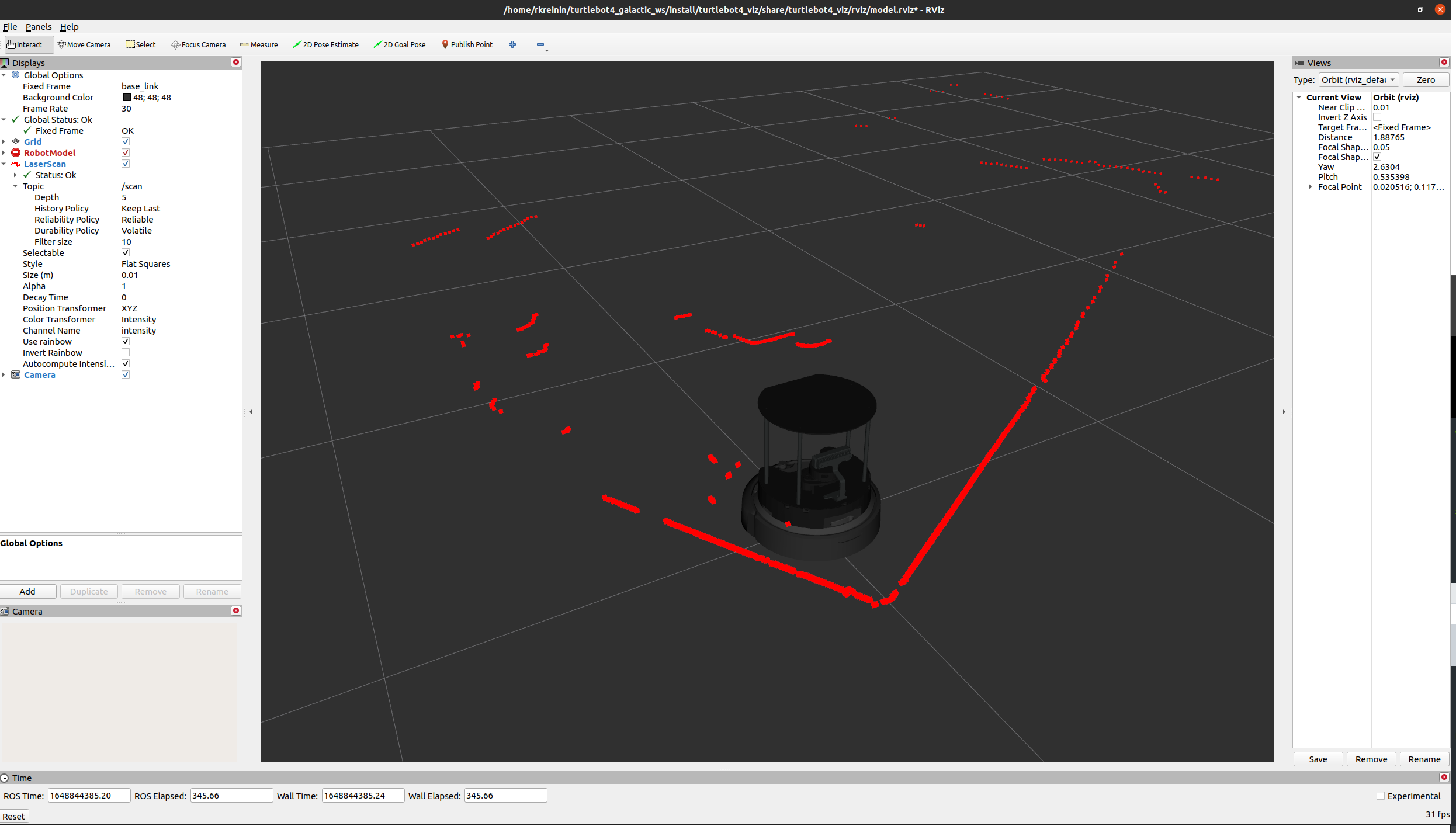
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号