



















TurtleBot4快速入门教程-软件综述
TurtleBot4快速入门教程-软件综述
说明:
- 本教程主要介绍TurtleBot4的Create® 3、树莓派4和用户PC需要用的的系统软件以及功能作用
相关设备
- TurtleBot4机器人套件:采购地址
概述
TurtleBot4在Ubuntu 20.04 LTS (Focal Fossa)或者在Ubuntu 22.04.2 LTS上运行,目前仅支持ROS2 Galactic和ROS2 Humble。TurtleBot 4软件在 Apache 2.0 许可下完全开源,可公开在 TurtleBot Github上有2台主计算机运行
TurtleBot 4使用的软件:Raspberry Pi 4和Create® 3板载处理器。用户还可以使用自己的PC连接到机器人,查看传感器数据和配置机器人等。每台计算机都需要运行带有ROS2 Galactic的Ubuntu 20.04系统,或者带有ROS2 Humble的Ubuntu 22.04系统网络图
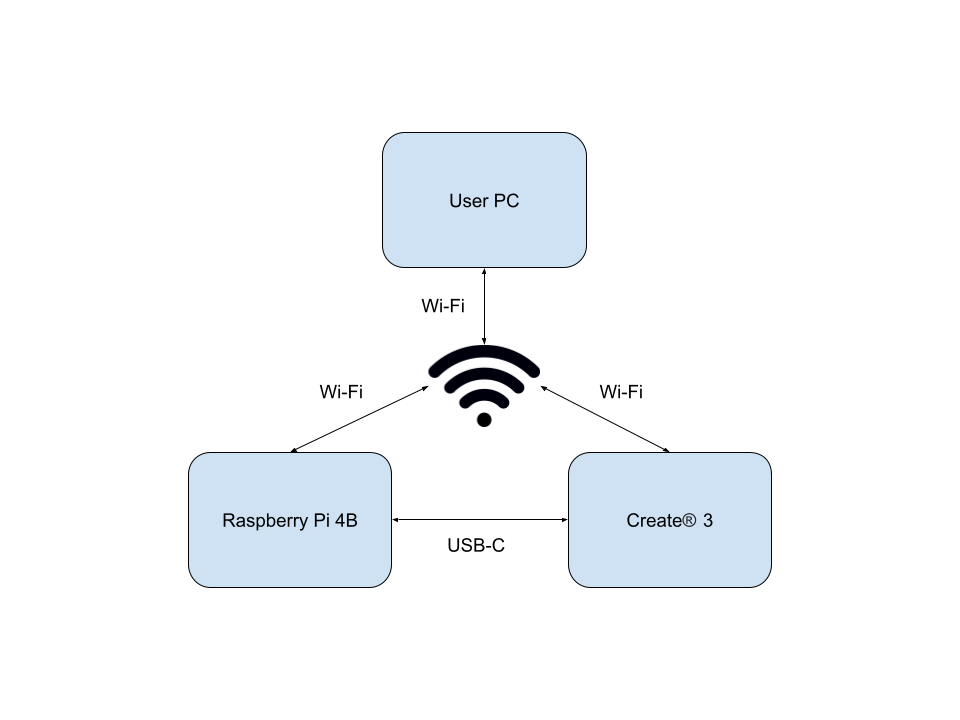
Create® 3
Create® 3通过WiFi和为Raspberry Pi供电的type-c线发布ROS2 话题、动作和服务- 这使用户可以访问电池状态、传感器数据和充电桩对接操作等。
- 虽然
Create® 3可以仅与type-c接口一起使用,但要在RViz上查看机器人模型或从用户PC运行SLAM或Nav2等软件,Create® 3将需要WiFi连接
Raspberry Pi 4
TurtleBot 4和TurtleBot 4 Lite上的Raspberry Pi 4预装了Ubuntu 20.04 Server、ROS2 Galactic和TurtleBot 4软件最新的
TurtleBot 4官方镜像获取地址:http://download.ros.org/downloads/turtlebot4/Raspberry Pi 4的用途是运行TurtleBot 4ROS节点、运行传感器ROS节点、使用蓝牙连接TurtleBot 4控制器、访问GPIO等等
User PC
- 用户PC用于配置机器人、可视化传感器数据、运行
TurtleBot 4仿真以及运行其他软件 - PC 需要运行安装了
ROS2 Galactic的Ubuntu 20.04,或者使用运行Ubuntu 20.04的虚拟机 - 典型的笔记本电脑或台式机将提供比
Raspberry Pi更高的处理性能,因此在PC上运行Nav2或SLAM等应用程序将提供显着的性能改进。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号