



















create® 3入门教程-硬件安装
说明:
- 介绍Create® 3硬件安装
相关设备
- Turtlebot4机器人套件:采购地址
有效载荷

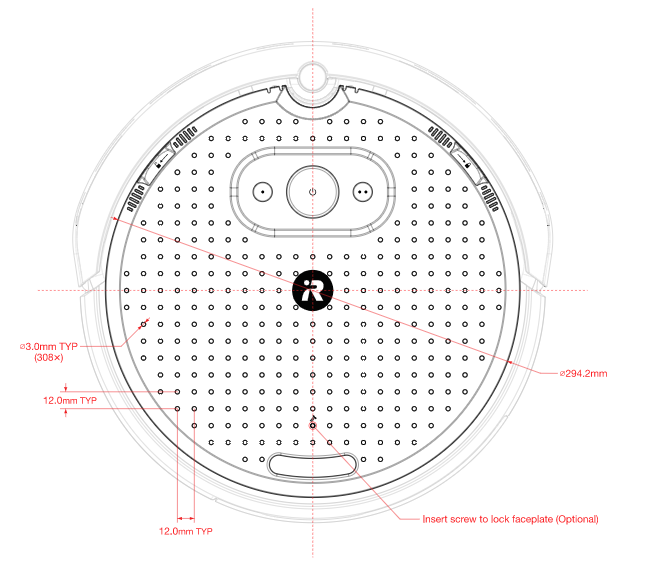
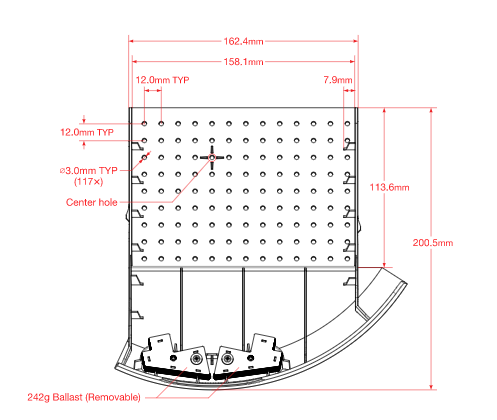
传感器或附件可以连接到面板或内部货舱,两者都具有 3 毫米直径的常规 12 毫米网格安装孔
推荐的最大有效载荷重量(不改变加速度限制)是底盘重心正上方 9 公斤。机器人可以通过降低加速度限制或仔细管理负载来处理更多重量
卸下或安装面板
- 通过使用拇指托在机器人的中心轴上旋转面板来移除面板。顶盖上的四个定位销用于安装和固定面板
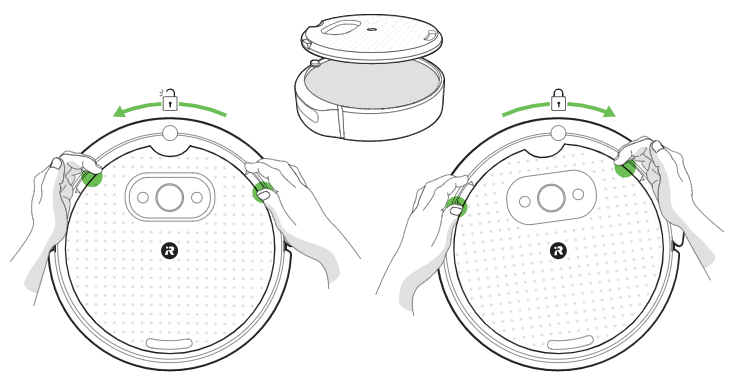
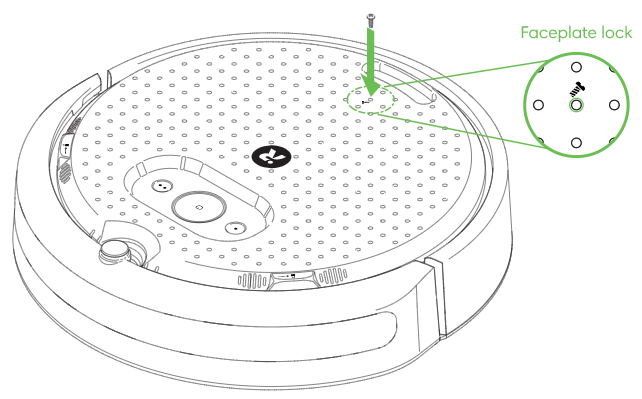
锁定面板
- 如果您想锁定面板并防止其旋转,您可以将 M3 自攻螺钉或销钉插入标有螺钉图像的面板孔中(安装面板时)
带凸台的自攻螺钉
- Create® 3 机器人的孔尺寸适合 M3 或 #4 螺钉。可以使用特殊的自攻塑料螺钉(或夹点金属板或木螺钉)将盖子拧入 3D 打印的凸台
带螺母的机械螺钉
- Create® 3 机器人的孔尺寸适合 M3 或 #4 螺钉
电缆扎带
- 束线带(也称为束线带)可以穿过 3 毫米的孔。2.5 毫米的宽度很常见,非常适合
麻花领带
- 扭结是一种快速、便宜且可重复使用的固定电线或其他非结构件的方法
塑料铆钉
- 推入式分体式塑料铆钉(用于 M3 或 0.115" 孔)是将薄料安装到 Create® 3 机器人面板的快速且廉价的方法
高度复杂的联锁砖系统
- 典型的玩具积木的螺柱间距为 8 毫米,而 Create® 3 的孔间距为 12 毫米。可以将适配器 (576 kB)放入每隔一个孔中,以便将玩具积木连接到 Create® 3。我们建议以 100% 填充打印
添加传感器
- 提供了一个不断增长的支架库,用于将传感器连接到 Create 3 机器人,使用其 3 mm 孔的 12 mm 网格
添加后脚轮
- 开箱即用,Create® 3 的重心位于两个驱动轮的前面,并具有一个集成的前脚轮作为第三个接触点。如果您添加一个很重的有效负载和/或导致机器人重心移动到驱动轮后面,您可能需要在后部添加第二个脚轮以防止沿后边缘滑动。您将在下面找到两种可 3D 打印解决方案的设计,它们在 Create® 3 的后部添加了第二个Roomba® 脚轮
后脚轮附件
- 第一个选项是较小的打印件(99 x 83 x 58 毫米),连接到 Create® 3 货舱的后部。它的构建速度更快、更简单,但突出于机器人后部 54 毫米,因此它可能不适合机器人需要在狭窄空间或杂乱环境中导航的情况

- 使用印刷闩锁和两个 M3 或 #4 自攻螺钉将后脚轮附件固定在货舱的把手和电缆通道之间。Roomba® 脚轮插入底部开口并用一个小锁定件固定到位,然后将其拧入到位。如果脚轮不能自由旋转,请沿脚轮的旋转轴打磨或锉平轴承表面
带集成脚轮的货舱
- 第二种选择用包含集成后脚轮的货舱替换随附的货舱。它需要更大的打印体积(208 x 201 x 66 毫米)并略微减少货物空间,但该解决方案不会超出机器人的背部。这允许机器人在狭小的空间内转弯,并减少脚轮附件被环境中的物体卡住的可能性

- 组装时,将 Roomba® 脚轮从底部插入,并使用 M3 自攻螺钉固定的印刷脚轮锁将其固定到位。根据您的有效载荷重量和分布,您可能还希望将压载物从随附的 Create® 3 货舱转移到这个新货舱
可下载的 3D 模型

- 下载此STEP 模型 (17.8 MB) 以帮助设计 Create® 3 的附件或有效负载
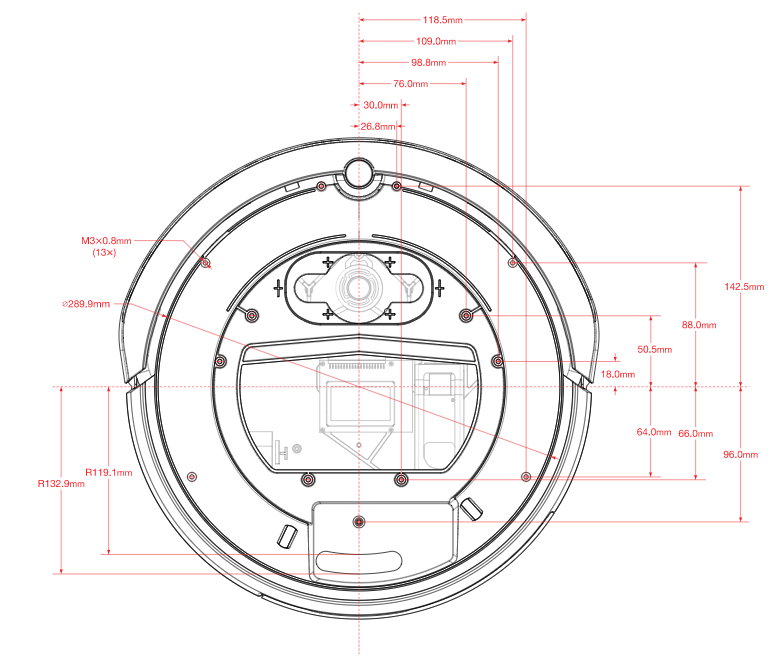
尺寸图
- 带面板的顶部
- 移除面板的顶部
- 侧面图
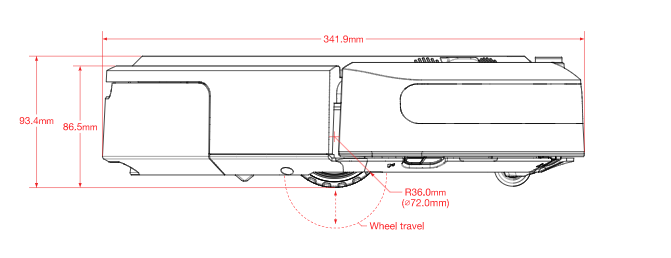
车轮行程约为 30 毫米
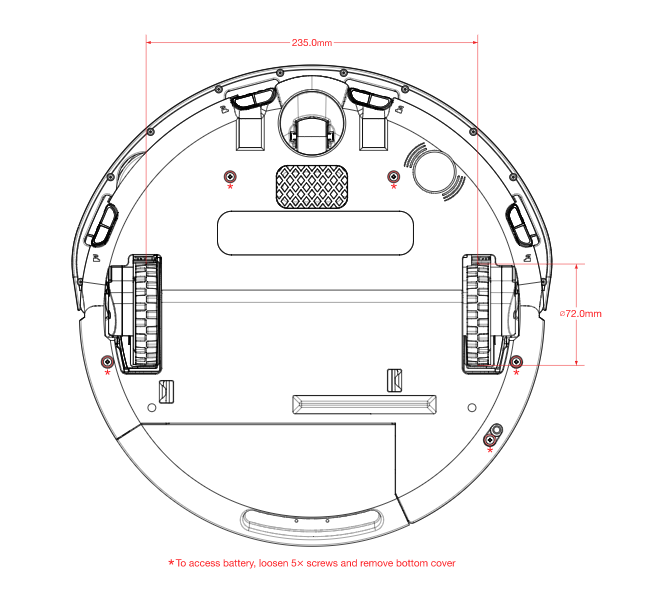
- 底视图
- 货舱 - 顶部
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号