



















ROS命令管理器-部署-快速搭建ROS2下的turtlebot3仿真环境(桌面版)
ROS命令管理器-部署-快速搭建ROS2下的turtlebot3仿真环境
说明:
- 介绍如何利用RCM快速搭建ROS2下的turtlebot3仿真环境
- ROS2版本:galactic
步骤:
- 已经完成ubuntu20.04系统安装和优化,参考ROS命令管理器-部署-快速安装ubuntu20.04系统并优化
- 已经完成ROS2环境搭建,参考ROS命令管理器-部署-快速搭建ROS2环境
- 第一步: 安装turtlebot3仿真
- 打开commands,点击ros2_tb3_gazebo目录,导入install_tb3_ros2_galactic.json

- 点击
启动之后,等待安装完成 - 第二步: 重新source
- 因为这个通过源码安装,会自动创建和添加新的工作空间~/ros2_tb3_ws,需要关闭commands
- 终端新,重新source,再启动commands
source ~/.bashrc
commands
- 第三步: 测试启动和控制
- 打开commands,点击ros2_tb3_gazebo目录,导入install_tb3_ros2_control.json

点击"launch turtlebot3 world"行后的
启动,就是启动turtlebot3仿真点击"launch turtlebot3 teleop"行后的
启动,就是启动键盘控制通过键盘控制就可以控制小车在仿真环境中移动
第四步: 测试建图
打开commands,点击"清空命令列表", 并关闭之前启动的程序
点击ros2_tb3_gazebo目录, 导入install_tb3_ros2_mapping.json
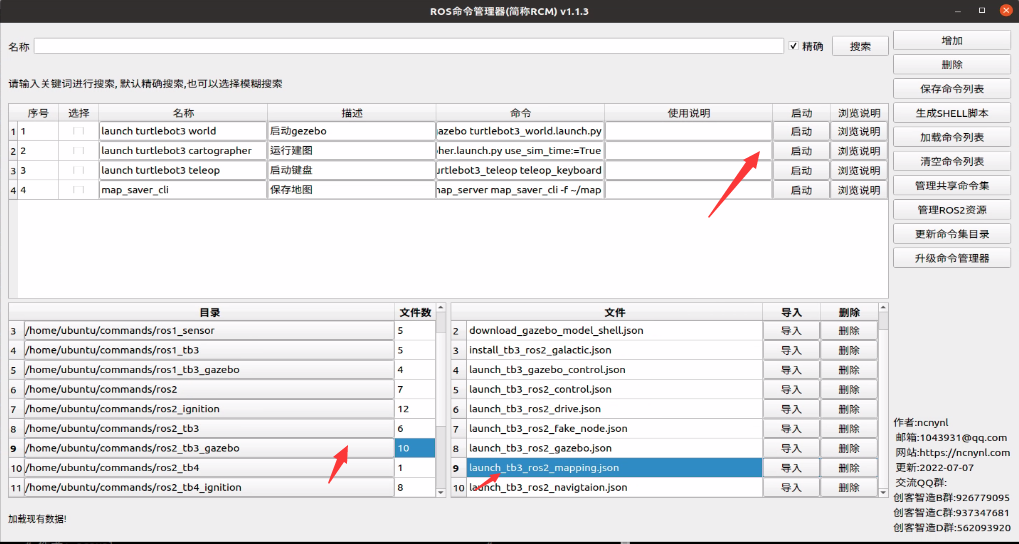
点击"launch turtlebot3 world"行后的
启动,就是启动turtlebot3仿真点击"launch turtlebot3 cartographer"行后的
启动,就是启动cartographer的建图点击"launch turtlebot3 teleop"行后的
启动,就是启动键盘控制通过键盘控制小车移动实现建图,完成之后,进行保存地图
点击"map_saver_cli"行后的
启动,就是启动保存地图,自动保存为~/map.pmg和~/map.yaml第四步: 测试导航
打开commands,点击"清空命令列表", 并关闭之前启动的程序
点击ros2_tb3_gazebo目录, 导入install_tb3_ros2_navigation.json

- 点击"launch turtlebot3 world"行后的
启动,就是启动turtlebot3仿真 - 点击"launch turtlebot3 navigation"行后的
启动,就是启动导航和rviz - 自动加载第三步保存的地图,初始化位置之后,就可以通过设置目标点,进行导航了
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号