



















Turtlebot4入门教程-机械-Turtlebot4构件
Turtlebot4入门教程-机械-Turtlebot4构件
说明:
- 介绍Turtlebot4的机械构件,TurtleBot 4 旨在进行修改以满足您的需求,并可以连接额外的传感器和配件。
相关设备:
- Turtlebot4机器人套件:采购地址
将附件连接到顶部集成板
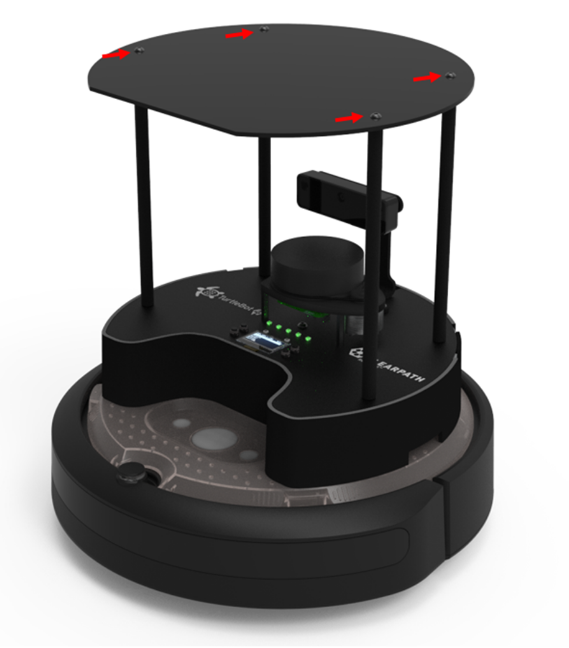
- TurtleBot 4 在顶部配备了一个易于修改的亚克力板,以便连接额外的传感器和外围设备。
- 只能在将板从机器人上拆下时对板进行修改,尝试在安装时修改板会导致塑料破裂。
卸下顶部集成板
- 该板通过四个圆头 M4x0.7 螺钉连接到机器人上。 使用 2.5 毫米六角扳手卸下螺钉。
对顶部集成板进行修改
修改板可以粗略地手动完成,但是在 Github 上提供了零件的 3D 模型和 2D 绘图。 切割或钻孔时,确保采取适当的安全预防措施; 戴上安全眼镜,熟悉您的工具,将板牢固地固定在工作台面上。 使用亚克力时,最好从较小的孔(Ø3mm)开始,然后逐渐扩大到所需的尺寸。
要重新连接板,请插入螺钉并将其拧紧至 120 N-cm。 由于顶部集成板上有额外的重量,建议使用低强度或中等强度的螺纹锁具以增加安全性。
将附件连接到基本单元
在 PCBA 上方以及 Create® 3 用户按钮附近和外壳内部有传感器可以连接到基本单元的空间。
要将附件连接到 PCBA 上方,可以为所需附件设计安装支架,并通过将它们固定到支架上来连接到 TurtleBot 4。 在 Github 上可以找到 TurtleBot4 的 3D 模型,可以帮助设计过程。
要将附件连接到外壳内,应移除 PCBA 和 Create® 3 集成板。 在内部,可以使用现有的孔,或者可以加工或 3D 打印额外的安装特征。
要将配件连接到 Create® 3,可以使用板上现有的孔,或者可以通过移除 Create® 3 集成板来钻额外的孔。

卸下 PCBA
- 要访问 TurtleBot4 的“外壳”内部,可以移除 PCBA。
- 确保您在卸下 PCBA 时有一个安全的位置来放置它,以防止损坏组件。
- 建议在静电放电垫上执行此程序,以保护 PCBA 免受静电造成的损坏。
- 请按照以下步骤卸下 PCBA。
- 1.拆下顶部集成板和四个支架。
- 2.断开连接到 Oak-D 相机和 RPLIDAR 的 USB 电缆。 将这些电缆穿过机器人背面的开口。
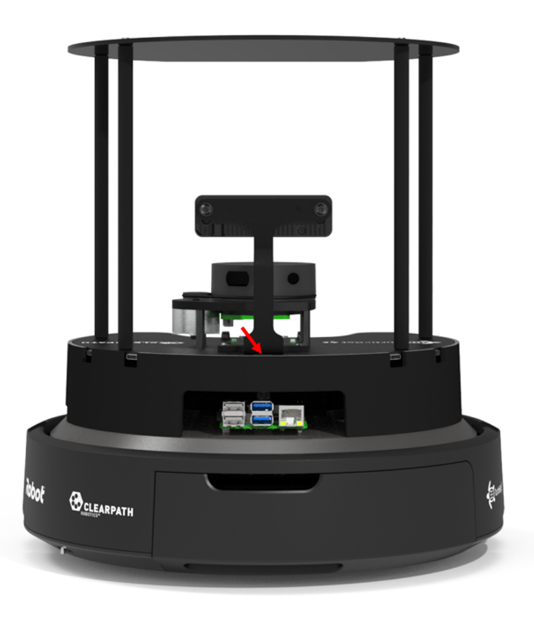
- 3.握住相机支架或 RPLIDAR 底座,小心提起 PCBA。
- 4.断开 USB-B 电缆、电源线束、40 针带状电缆、风扇电缆以及可能已连接的任何其他电缆。
- PCBA 现在应该可以自由移除并安全放置。
卸下 Create® 3 集成板和外壳
Create® 3 集成板和外壳可以在组件的其余部分打开或关闭时移除。 要卸下 Create® 3 集成板,首先打开并卸下 Create® 3 后托盘。 然后从 Create® 3 底座上断开 USB C 电缆和电源线束。
将这些电缆穿过 Create® 3 背面的插槽。使用 Create® 3 上的卡舌,逆时针旋转板,直至其卡入以解锁并取下板。

- 要重新连接板,请将板稍微倾斜,使柱子适合卡舌。 然后,顺时针转动板,直到它卡回原位。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号