



















Turtlebot4入门教程-软件-RVIZ2
Turtlebot4入门教程-软件-RVIZ2
说明:
- 介绍如何在Turtlebot4使用RVIZ2
相关设备:
- Turtlebot4机器人套件:采购地址
Rviz2
- Rviz2 是 Rviz 到 ROS2 的移植。 它为用户提供了一个图形界面来查看他们的机器人、传感器数据、地图等。
- 它默认与 ROS2 一起安装,需要桌面版本的 Ubuntu 才能使用。
- turtlebot4_desktop 提供启动文件和配置,用于在 Rviz2 中查看 TurtleBot 4。
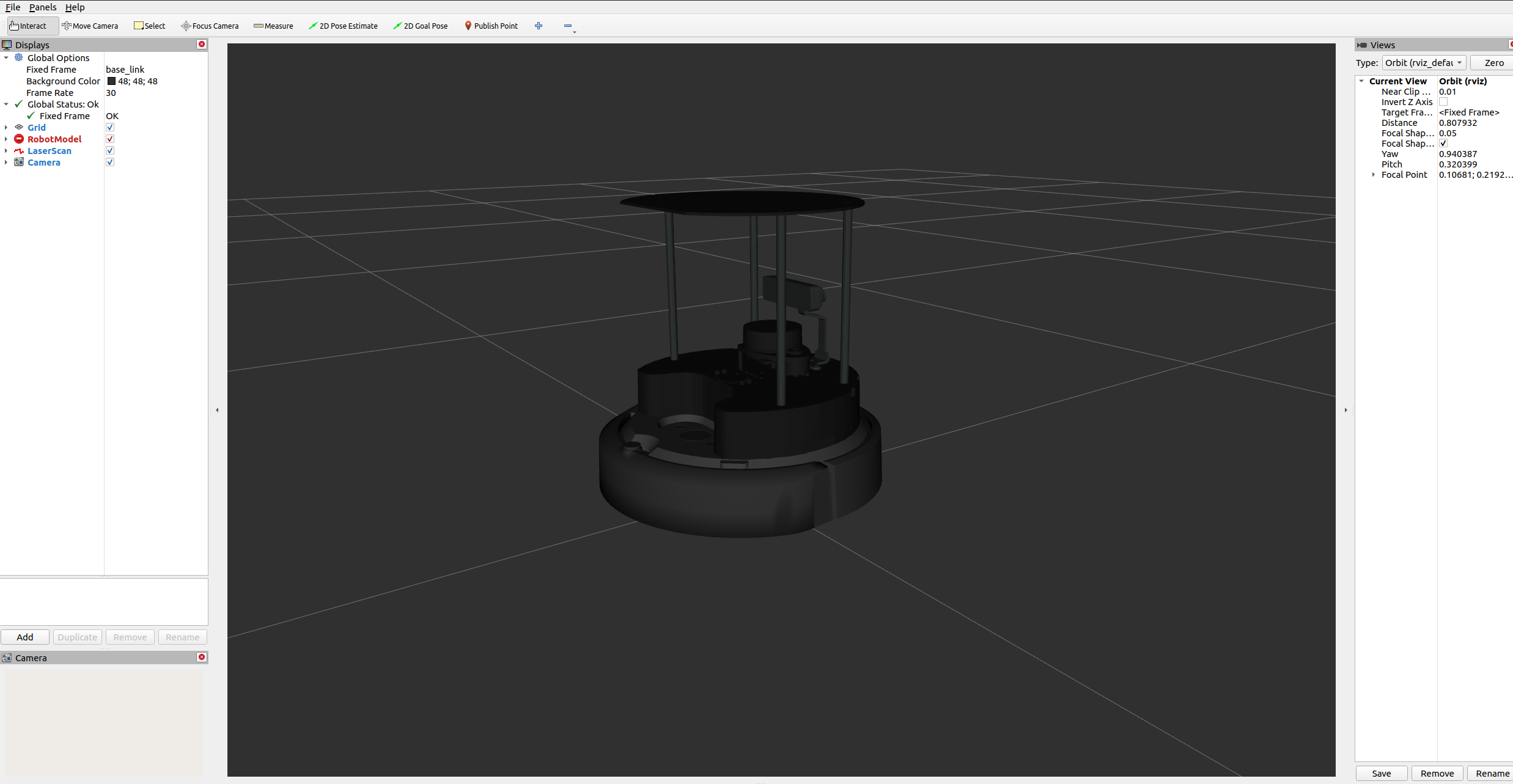
View Model
- 要检查模型和传感器数据,请运行
ros2 launch turtlebot4_viz view_model.launch.py
- 效果图
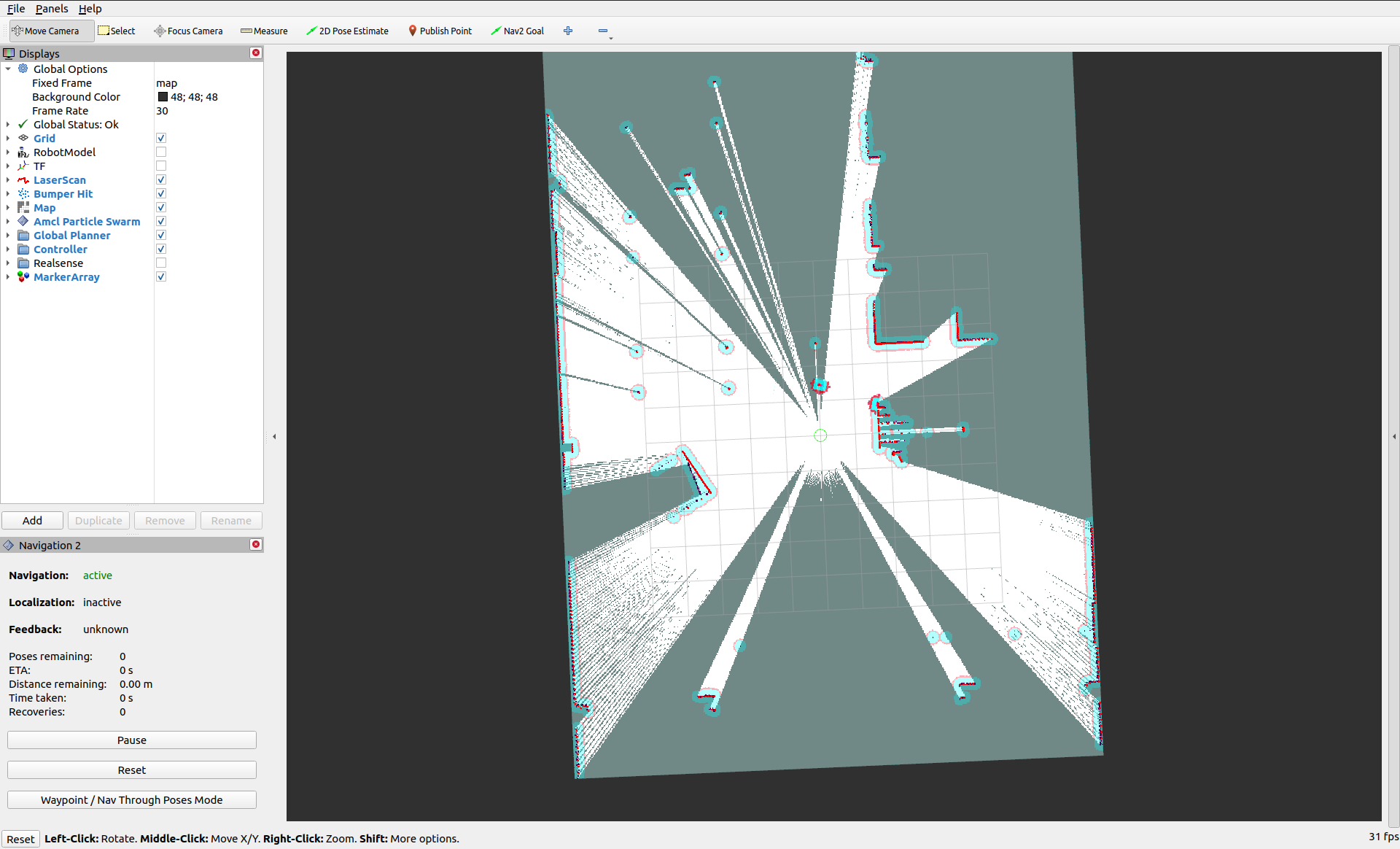
View Robot
- 要查看机器人在其环境中的俯视图,请运行
ros2 launch turtlebot4_viz view_robot.launch.py
- 这在使用机器人进行映射或导航时很有用
- 效果图
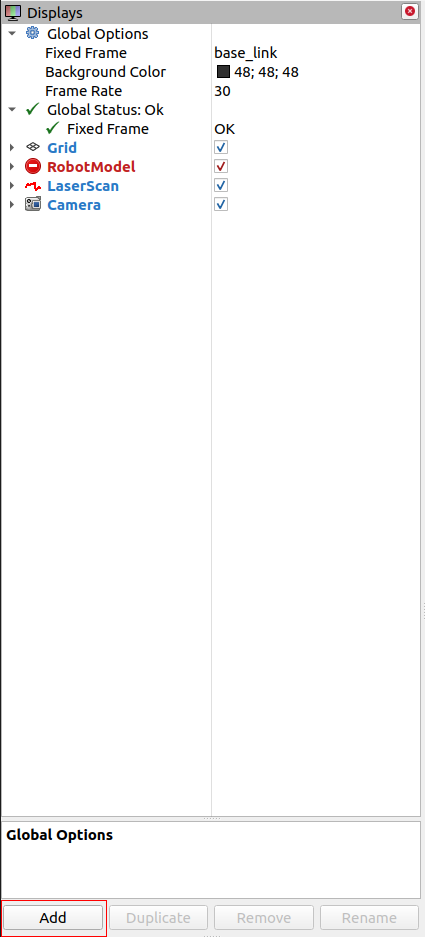
Rviz2 Displays
- Rviz2 支持显示来自各种来源的数据。 可以使用“添加”按钮添加显示
LaserScan
- LaserScan 显示屏显示 sensor_msgs/msg/LaserScan 消息的数据。
- 在 TurtleBot 4 上,RPLIDAR 在 /scan 主题上提供此数据。
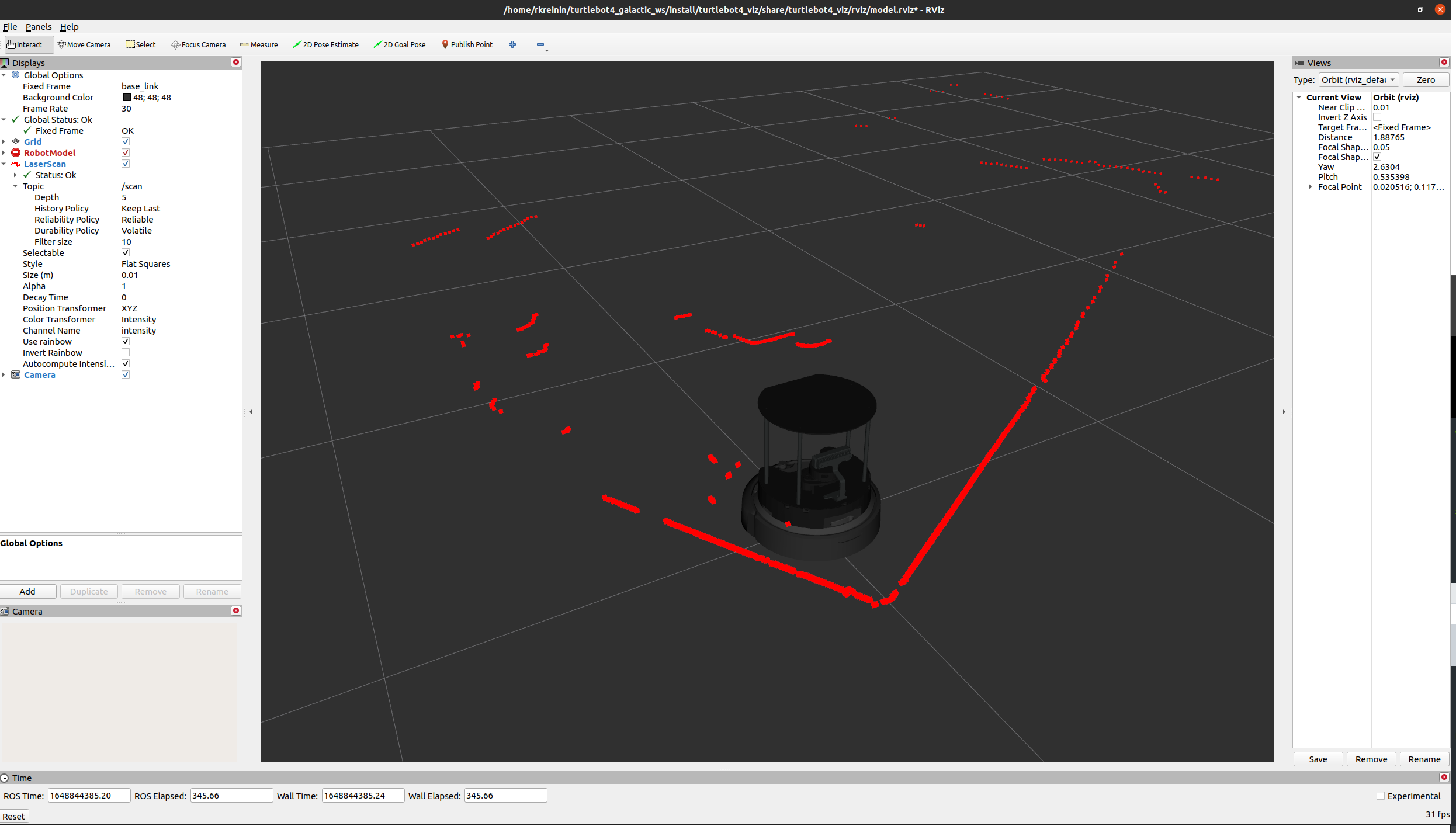
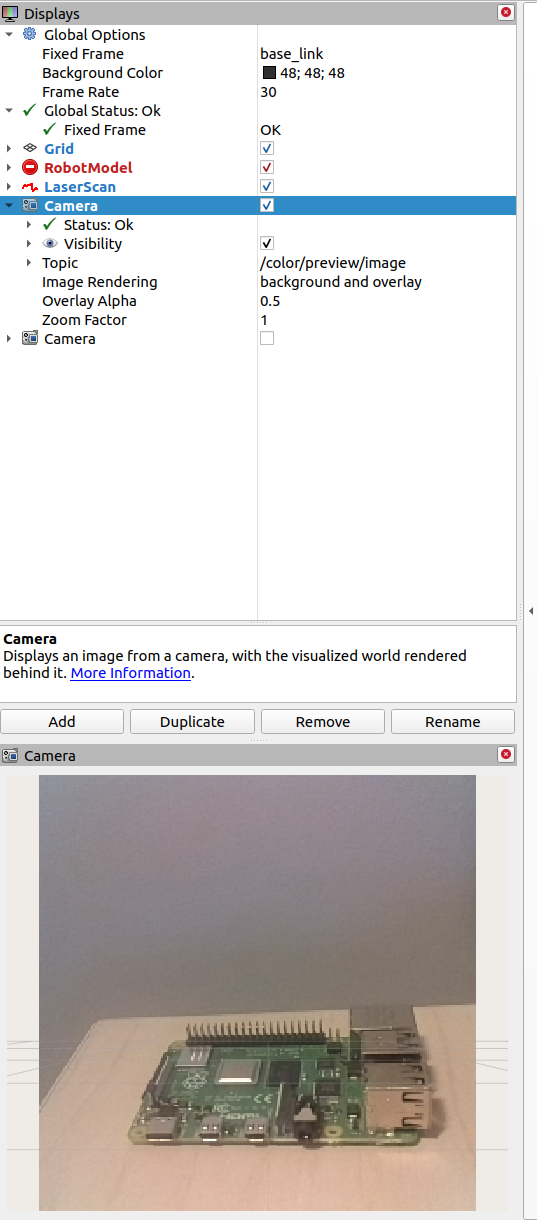
Camera
- 相机显示显示来自 sensor_msgs/msg/Image 消息的相机图像。
- OAK-D 相机在 /color/preview/image 和 /stereo/depth 主题上发布图像。
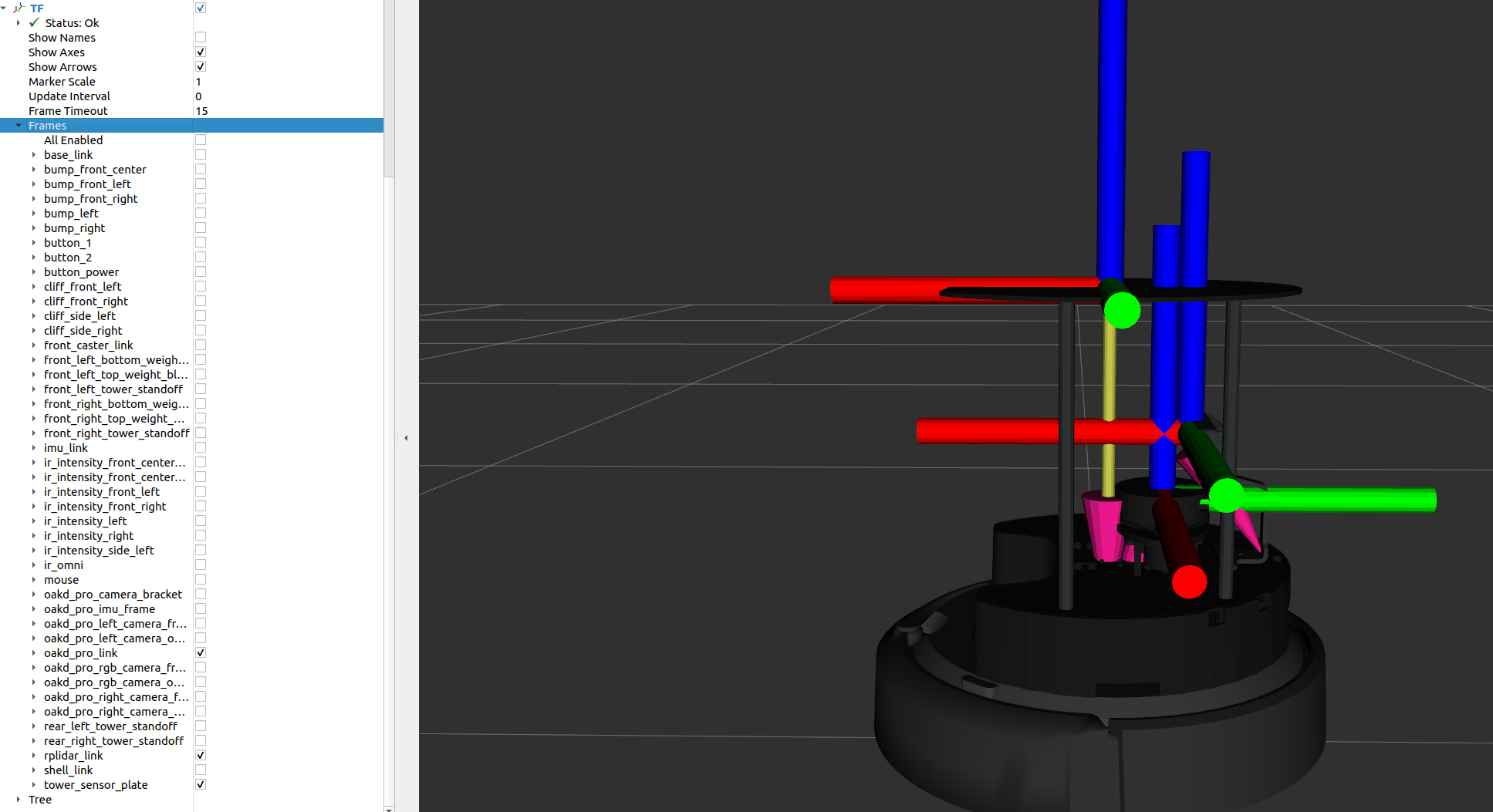
TF
- TF 可用于可视化组成机器人的链接。 当您第一次添加 TF 显示时,它将显示组成机器人的每个链接。
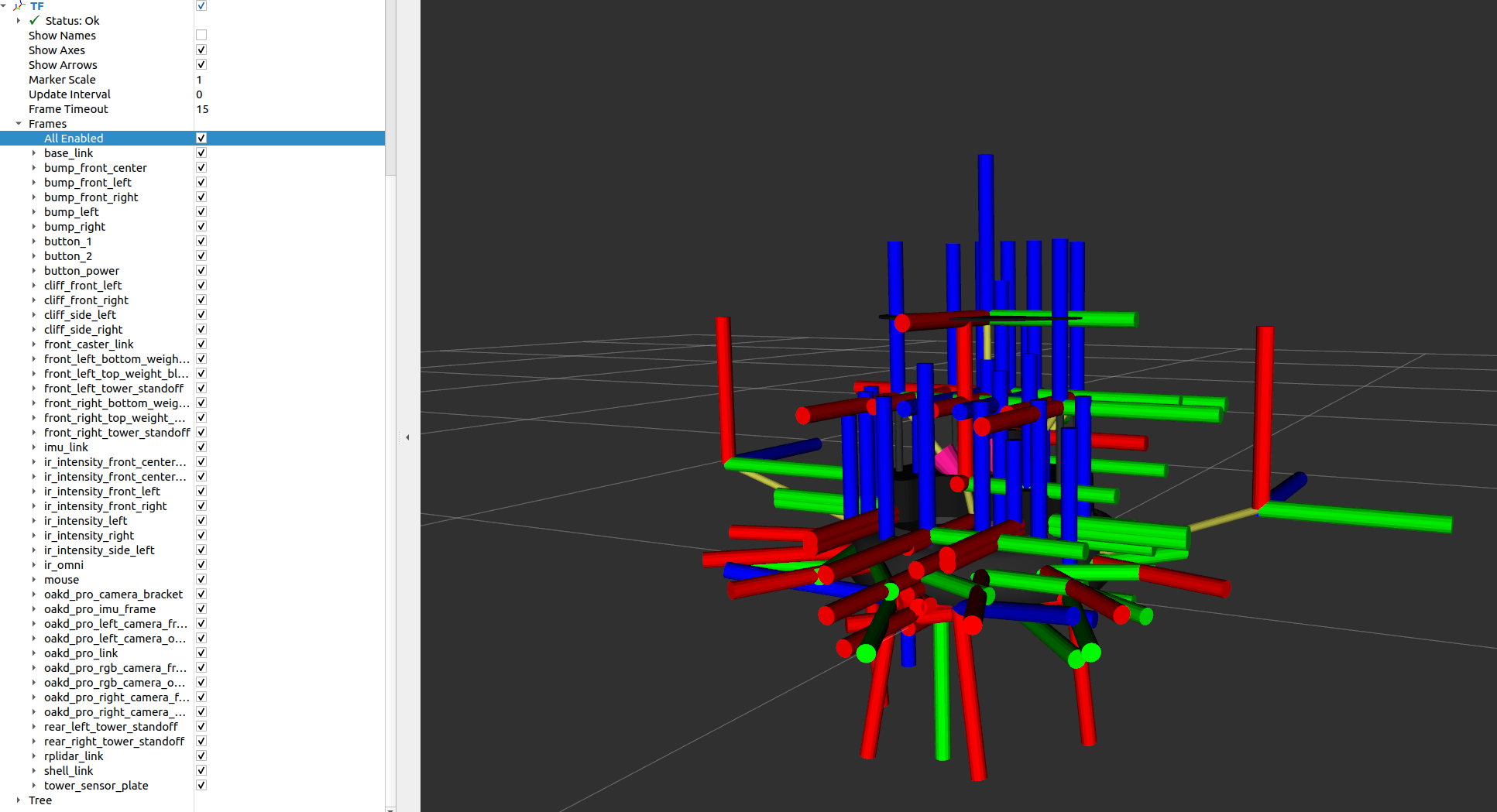
- 您可以取消选中“全部启用”框,然后选择您希望查看的链接。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号