



















walking机器人入门教程-rviz插件-多点导航插件的航点保存和加载
walking机器人入门教程-rviz插件-多点导航插件的航点保存和加载
说明:
- 介绍如何使用rviz的多点导航插件进行航点保存和加载
步骤:
- 启动底盘
ros2 launch walking_bringup robot.launch.py
- 启动建图
ros2 launch walking_navigation bringup_v1.launch.py use_slam:=true
- 使用插件
- 在rviz上,先删除掉默认的navigation 2的多点导航面板, 加载新的WalkingNavigation多点导航面板
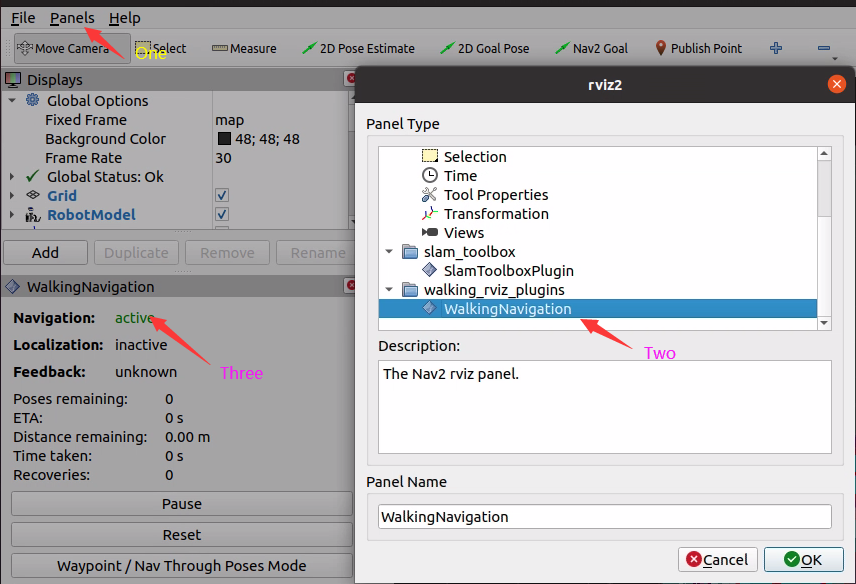
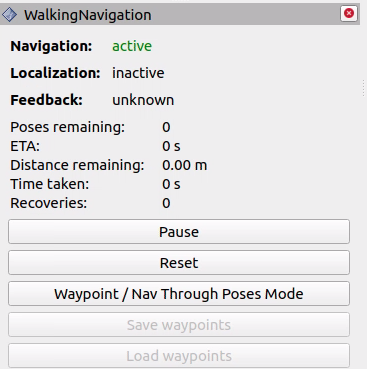
- WalkingNavigation面板
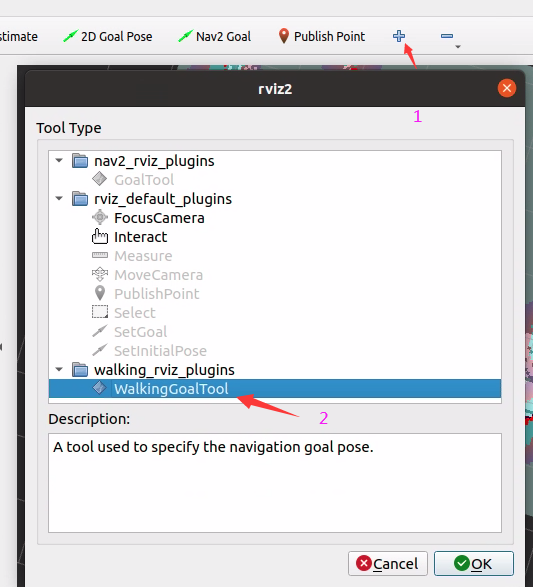
- 添加目标点设置工具Walking Goal
- 规划航点
- 在多点导航面板上,选择waypoint/Nav Through Poses Mode 即可利用Walking Goal来设置多个航点

- 保存航点
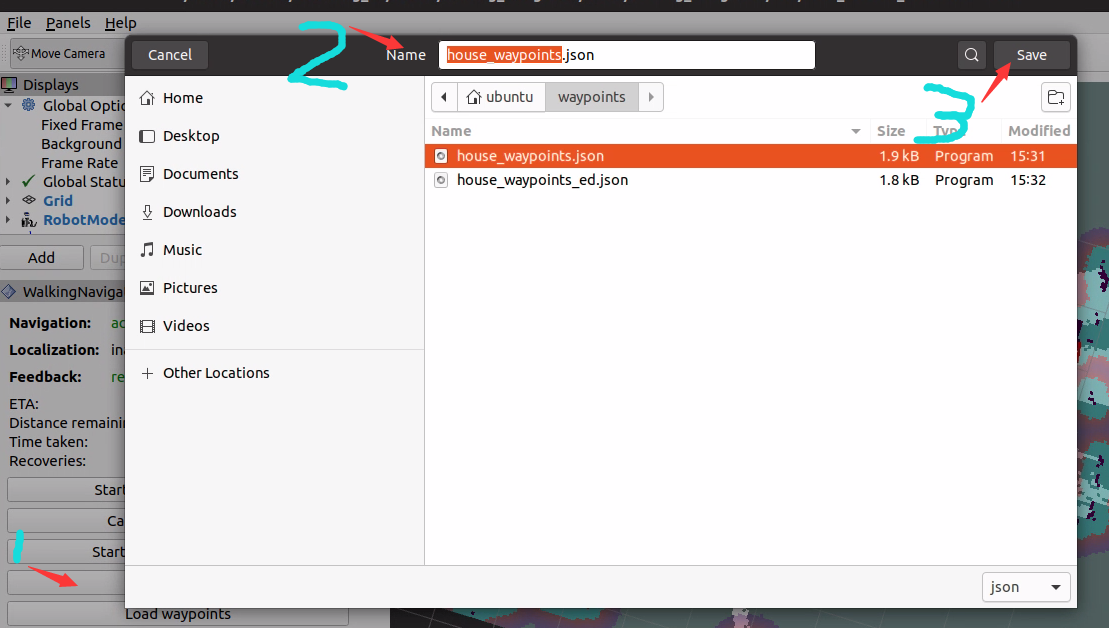
- 设置完成之后,点击Save waypoints
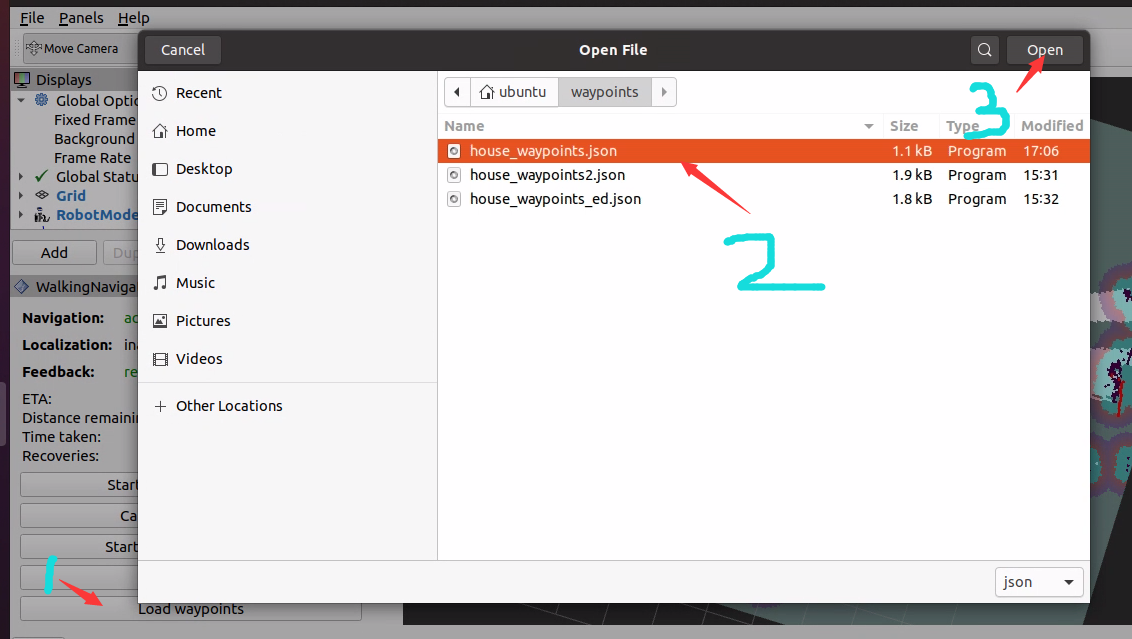
- 加载航点
- 也可以选择加载航点
- 保存的航点文件内容
- 查看内容
cd ~/waypoints
cat house_waypoints.json
{
"pose": [
{
"id": "0",
"orient_w": 0.8050701343307722,
"orient_x": 0,
"orient_y": 0,
"orient_z": -0.5931796345194535,
"pos_x": 1.8484327793121338,
"pos_y": 1.3773943185806274
},
{
"id": "1",
"orient_w": 0.8050702010702419,
"orient_x": 0,
"orient_y": 0,
"orient_z": -0.5931795439398769,
"pos_x": 2.7054479122161865,
"pos_y": -1.6722935438156128
},
{
"id": "2",
"orient_w": 0.5066154674329881,
"orient_x": 0,
"orient_y": 0,
"orient_z": 0.8621721221181157,
"pos_x": 2.2616944313049316,
"pos_y": -1.6764355897903442
},
{
"id": "3",
"orient_w": 0.4757817526400094,
"orient_x": 0,
"orient_y": 0,
"orient_z": 0.879563371142069,
"pos_x": 1.6453624963760376,
"pos_y": 0.6690959930419922
}
]
}
- 除了在rviz上实现多点导航
- 也可以通过nav2_simple_commander脚本加载这个航点数据来实现航点导航.
- 更可以扩展航点内容,实现指定每个航点的动作,这个下回分解.
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号