



















walking机器人入门教程-应用-全景图
walking机器人入门教程-应用-全景图
说明:
- 介绍如何利用walking实现全景图功能
步骤:
- 启动底盘
ros2 launch walking_bringup robot.launch.py
- 启动相机
#启动usbcam相机
ros2 launch walking_visual usb_camera_node.launch.py camera_id:=0
#或启动d435i相机
ros2 launch walking_bringup d435i.launch.py
- 启动全景图进程
ros2 run walking_panorama panorama --ros-args --remap /camera/image:=/camera/color/image_raw
- 参数说明:
mode # 拍照模式, 默认是0用于全景图
pano_angle # 全景图的旋转角度, 一般是360度
snap_interval # 间隔角度,用于每次旋转的角度
rot_vel # 旋转的速度
- 订阅拼接图片话题/panorama
ros2 run rqt_image_view rqt_image_view
- 完成之后,显示拼接完成的图片
- 启动开始命令
ros2 service call /take_pano walking_msgs/TakePanorama "{mode: 0 , pano_angle: 360.0 , snap_interval: 10.0 , rot_vel: 0.1}"
- 小车开始旋转,停止保存图片,直到完成需要的角度
查看图片:
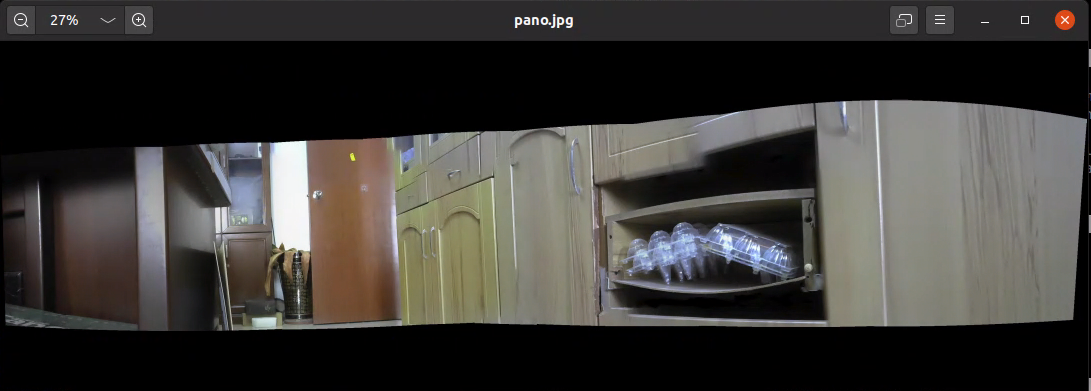
- 程序保存了拼接的图片保存在/tmp/pano.jpg
- 同时也保存了单独拍下的图片保存在/tmp/pano_1.jpg到/tmp/pano_xx.jpg
- 通过eog /tmp/pano.jpg可以查看拼接好的地图
- 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号