



















walking机器人入门教程-应用-aruco标签TF实现跟随
walking机器人入门教程-应用-aruco标签TF实现跟随
说明:
- 介绍如何通过aruco标签来实现跟随
原理:
- 通过aruco标签获取的定位信息同时并发布TF信息
- 通过获取camera_link到标签(aruco_marker_[26])的TF信息
- 通过TF信息,发布速度信息到话题/cmd_vel,从而实现跟随.
步骤:
- 进入脚本目录
cd ~/aiwalking_ws/src/walking_visual/walking_visual
- 用打印机,打印含DICT_ORIGINAL_20.png到DICT_ORIGINAL_26.png的aruco标签的图片ORIGINAL.png
- 图片如下:
- 右下角那个就是标签ID为26标签,并剪下贴到小纸板备用.
- 启动底盘
ros2 launch walking_bringup robot.launch.py
- 启动相机
#启动usbcam相机
ros2 launch walking_visual usb_camera_node.launch.py
#或启动d435i相机
ros2 launch walking_bringup d435i.launch.py
- 识别标签并发布定位信息和TF信息
ros2 launch walking_follow follow_aruco_tf.launch.py
- 效果图:

- 订阅TF发布速度命令
ros2 run walking_follow follower_aruco.py
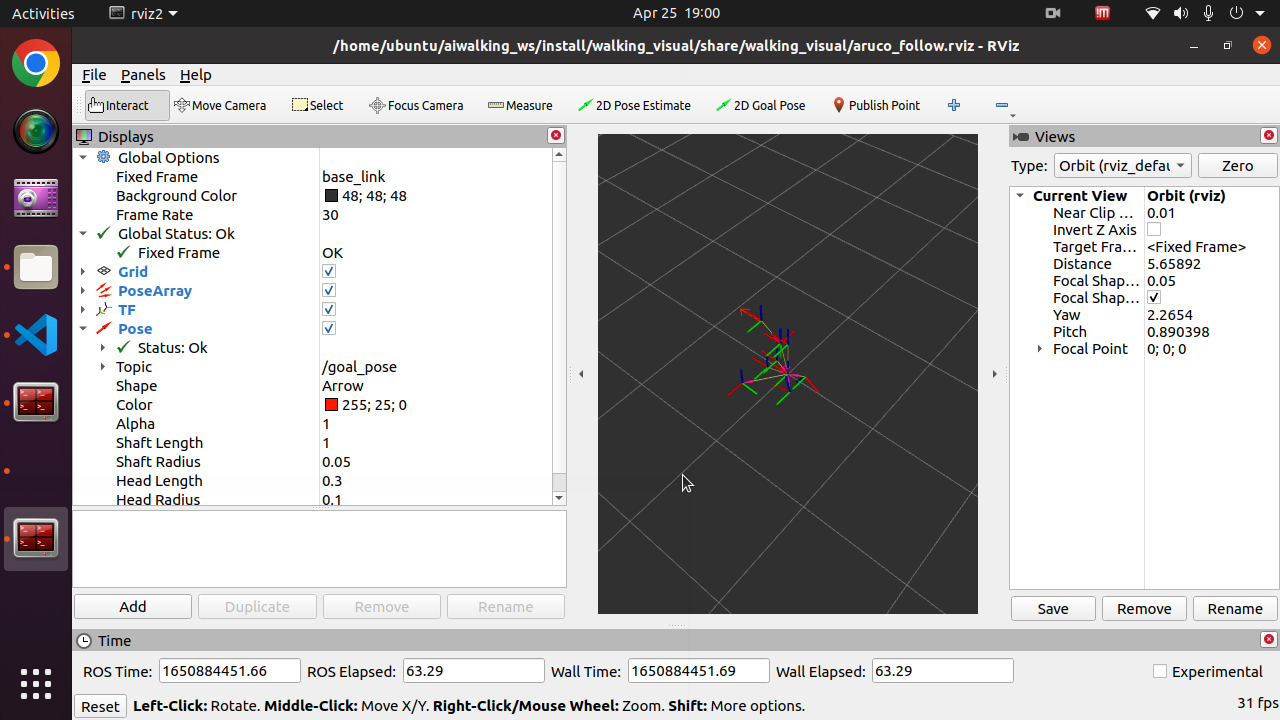
- 打开rviz查看TF信息
ros2 launch walking_visual rviz_follow.launch.py
- 效果图:
- 标签放置在摄像头前即可实现跟随.
- 标签到摄像头距离大于0.5米小车前进
- 标签到摄像头距离小于0.5米小车后退
- 标签离开摄像头视野范围,小车自动停止
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号