



















walking机器人仿真教程-应用-低电量实现自主对接充电
walking机器人仿真教程-应用-低电量实现自主对接充电
说明:
- 这个应用模拟电量后自动导航到充电桩并实现自动对接
相关设备:
- walking机器人套件:采购地址
步骤:
- 加载gazebo
. /usr/share/gazebo/setup.bash
- 启动仿真
ros2 launch walking_application hospital_world_connect_to_charging_dock_v2.launch.py
- 效果图:

- 发布满点状态
ros2 run walking_application full_battery_pub.py
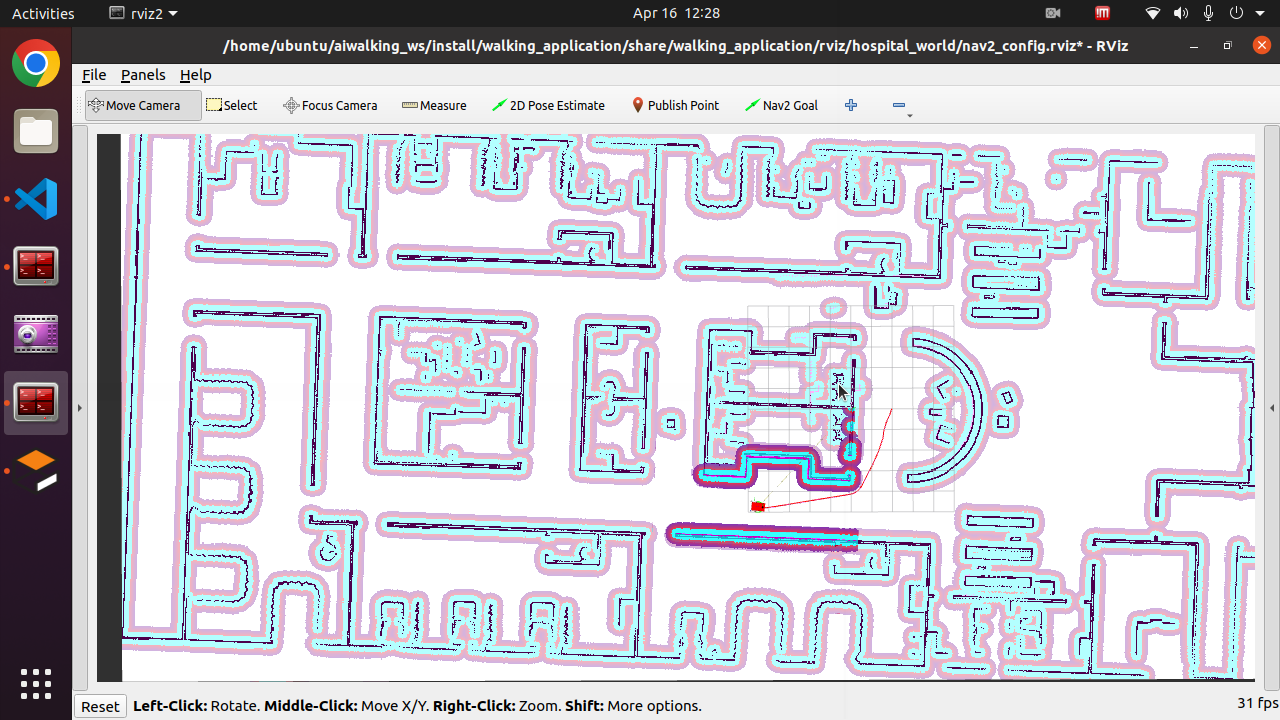
- 通过rviz设置任意目标点,先导航到其他位置
- 效果图:
- 发布低压状态
ros2 run walking_application low_battery_pub.py
- 完成自动对接后,发布正在充电状态
ros2 run walking_application charging_battery_pub.py
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号