



















walking机器人仿真教程-应用-实时加载地图实现多楼层导航
walking机器人仿真教程-应用-实时加载地图实现多楼层导航
说明:
- 这个应用模拟了在医院里到达新楼层加载新的地图。
- 假设在医院多楼层导航需要如下步骤:
在楼成5楼导航到病人的房间
拿起脏盘子
导航到电梯门
按下向下按钮
等待电梯打开
进入电梯
按下二楼电梯按钮
等待电梯到达二楼
退出电梯
加载二楼医院咖啡厅的新地图
相关设备:
- walking机器人套件:采购地址
步骤:
- 加载
. /usr/share/gazebo/setup.bash
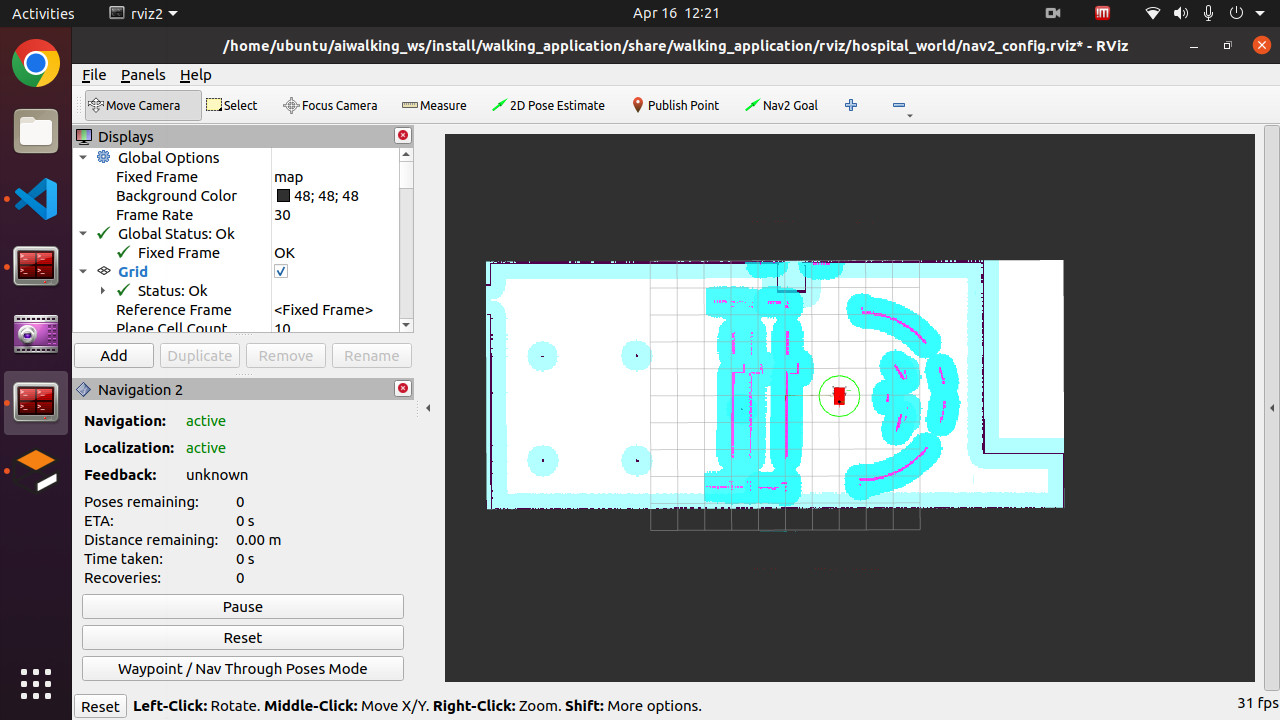
- 启动仿真, 加载第五层的地图
ros2 launch walking_application hospital_world_v1.launch.py
- 效果图:

- 完成上述步骤,到第十步
- 加载第二层的咖啡厅的新地图
ros2 service call /map_server/load_map nav2_msgs/srv/LoadMap "{map_url: /home/ubuntu/aiwalking_ws/src/walking_application/maps/cafe_world/cafe_world.yaml}"
- 咖啡厅的地图:

- 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号