



















ros2与传感器-整合imu传感器bno055
ros2与传感器-整合imu传感器bno055
说明:
- 介绍如何整合imu传感器bno055
- 测试环境: ubuntu20.04 ros2 galactic 采用uart方式接bno055
BNO055简介
- BNO055是BOSCH公司应用特定型ASSNs展品系列的新产品。
- 是一款系统级封装(SiP)解决方案,集成了一个三轴14位加速度计,一个三轴16位陀螺仪,一个三轴地磁传感器和一个32位Cortex M0+微控制器。
- 其封装尺寸只有3.8 x 5.2 x 1.13mm³,明显小于可比较的同级解决方案。
- 通过将传感器和传感器融合功能集成到单个设备中,BNO055可以简化客户的集成过程,使其免受复杂的多供应产品的烦恼,从而使得他们可以花费更多时间在产品创新上。
- 它是可穿戴,增强现实,个人健康,健身,室内导航和任何其他需要上下文感知的应用程序的完美选择。
步骤:
- 源码安装
mkdir -p ~/ros2_common_ws/src
cd ~/ros2_common_ws/src
git clone https://gitee.com/ncnynl/bno055
cd ~/ros2_common_ws
colcon build --symlink-install
- 配置端口
cd ~/ros2_common_ws/src/bno055/script
sudo ./create_udev_rules
- 重插imu的USB线, 查看是否存在端口
ls /dev/imu055
测试
- 启动bno055
. ~/ros2_common_ws/install/local_setup.bash
ros2 launch bno055 bno055.launch.py
- 查看话题如下
$ ros2 topic list
/bno055/calib_status
/bno055/imu
/bno055/imu_raw
/bno055/mag
/bno055/temp
/parameter_events
/rosout
- 查看话题内容如下
$ ros2 topic echo /bno055/imu
-----------------
header:
stamp:
sec: 1646734954
nanosec: 437958441
frame_id: bno055
orientation:
x: -0.7040389602526628
y: -0.06475815663875814
z: -0.07177718398414663
w: 0.7035506800895053
orientation_covariance:
- 0.0159
- 0.0
- 0.0
- 0.0
- 0.0159
- 0.0
- 0.0
- 0.0
- 0.0159
angular_velocity:
x: 0.0
y: -0.0022222222222222222
z: -0.0011111111111111111
angular_velocity_covariance:
- 0.04
- 0.0
- 0.0
- 0.0
- 0.04
- 0.0
- 0.0
- 0.0
- 0.04
linear_acceleration:
x: -0.07
y: -0.3
z: -0.01
linear_acceleration_covariance:
- 0.017
- 0.0
- 0.0
- 0.0
- 0.017
- 0.0
- 0.0
- 0.0
- 0.017
---
通过rviz插件查看
- 源码安装插件,这个目前只有基于ros2的eloquent版本,也可以在galactic下使用
- 我们只需要rviz_imu_plugin,复制这个包到~/ros2_common_ws/src/再单独编译这个包
cd ~
git clone -b eloquent https://github.com/ccny-ros-pkg/imu_tools
cp -r ~/imu_tools/rviz_imu_plugin ~/ros2_common_ws/src/
cd ~/ros2_common_ws/
colcon build --symlink-install --packages-select=rviz_imu_plugin
测试
- 新终端,启动imu
. ~/ros2_common_ws/install/local_setup.bash
ros2 launch bno055 bno055.launch.py
- 新终端,启动rviz2
rviz2
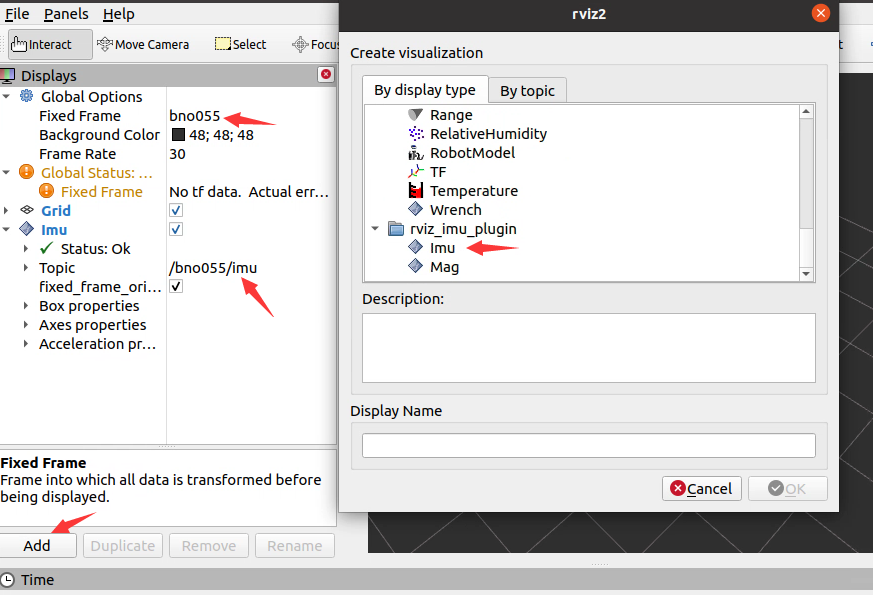
- 界面左下角点Add, 通过by display type 添加rviz_imu_plugin下的imu
- 话题选择/bno055/imu, fixed frame输入bno055
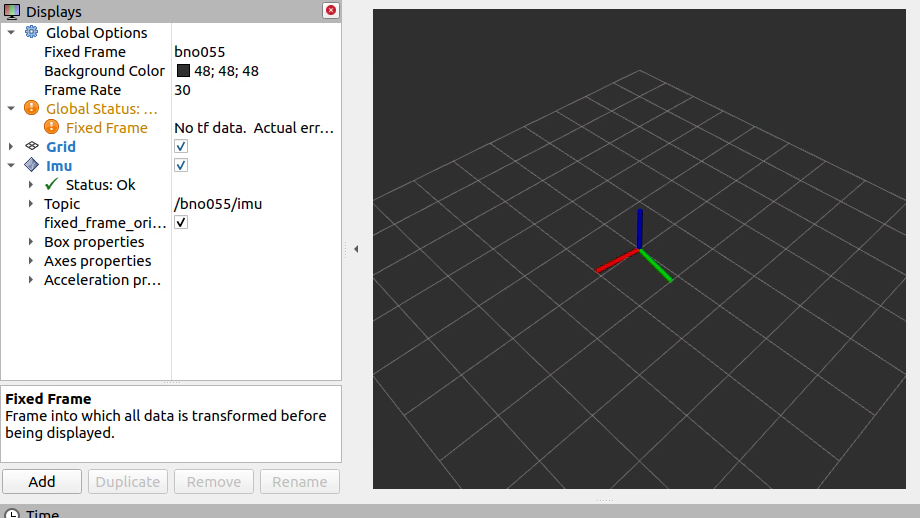
- 效果如图
- 最终效果
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号