



















ROS与传感器教程-整合bno055 imu传感器
ROS与传感器教程-整合bno055 imu传感器
说明:
- 介绍如何在ros下使用bno055 imu传感器
- bno055是一款9-DOF绝对定向IMU传感器,含bno-055 SiP加速度计,陀螺, 磁力计
- 基于20.04 noetic下测试, 目前测试的效果比较好.
使用ros_imu_bno055驱动步骤:
- 安装依赖
sudo apt install python3-pip python3-wxgtk4.0
pip3 install vpython
sudo apt install ros-noetic-rviz-imu-plugin
pip3 install pyserial
- 安装ros_imu_bno055 驱动
mkdir -p ~/ros1_commons_ws/src
cd ~/ros1_commons_ws/src
git clone https://gitee.com/ncnynl/bosch_imu_driver
cd ~/ros1_commons_ws
catkin_make
- 配置别名
source ~/ros1_commons_ws/devel/setup.bash
roscd ros_imu_bno055
sudo cp utils/99-bno055.rules /etc/udev/rules.
sudo udevadm control --reload-rules && sudo udevadm trigger
- 重插bno055的USB, 测试
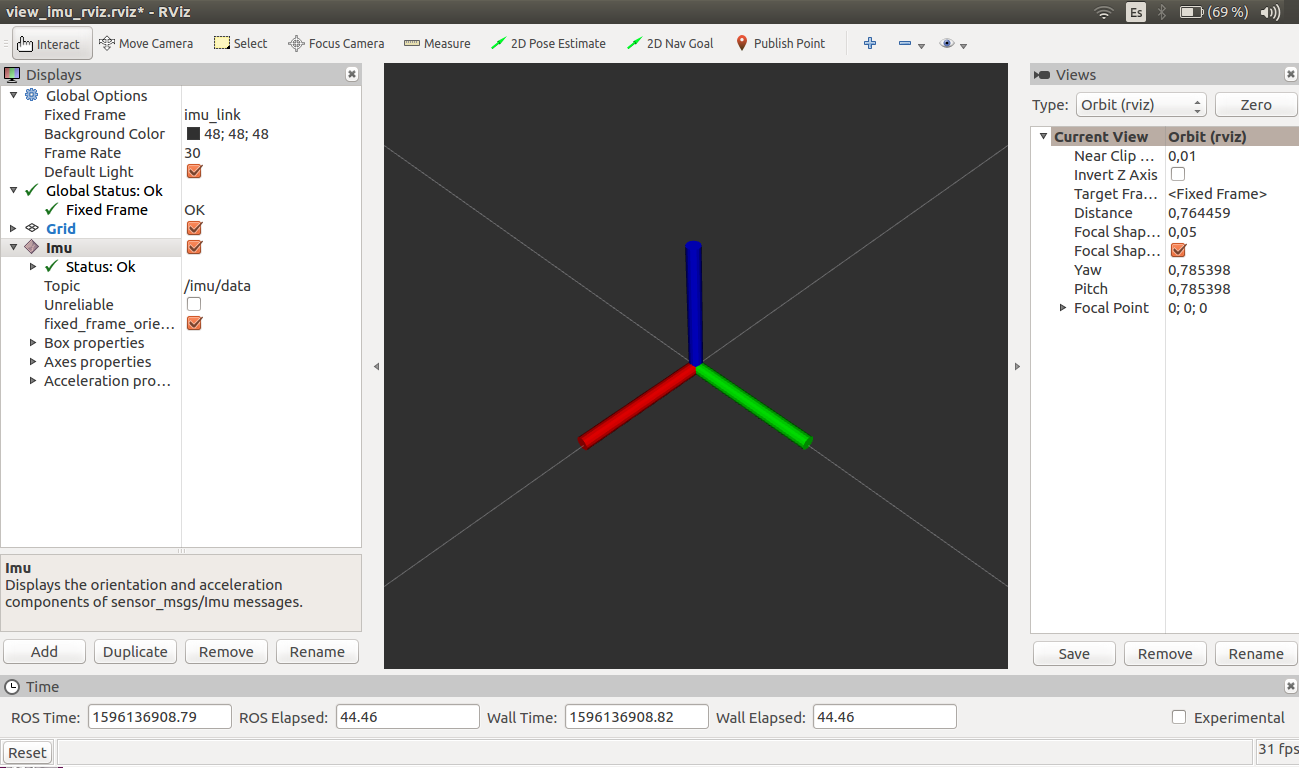
roslaunch ros_imu_bno055 view_imu.launch
- rviz中选择话题名为/imu
- 效果图:
使用bosch_imu_driver驱动步骤:
- 安装驱动
cd ~/ros1_commons_ws/src
git clone https://gitee.com/ncnynl/bosch_imu_driver
cd ~/ros1_commons_ws
catkin_make
source ~/ros1_commons_ws/devel/setup.bash
- 测试
roslaunch bosch_imu_driver imu.launch
- rviz中选择话题名为/imu, 效果同上
使用网页显示imu数据:
- 安装驱动
cd ~/ros1_commons_ws/src
git clone https://gitee.com/ncnynl/razor_imu_9dof
cd ~/ros1_commons_ws
catkin_make
source ~/ros1_commons_ws/devel/setup.bash
- 测试
- 启动imu
roslaunch ros_imu_bno055 view_imu.launch
或者
roslaunch bosch_imu_driver imu.launch
- 显示
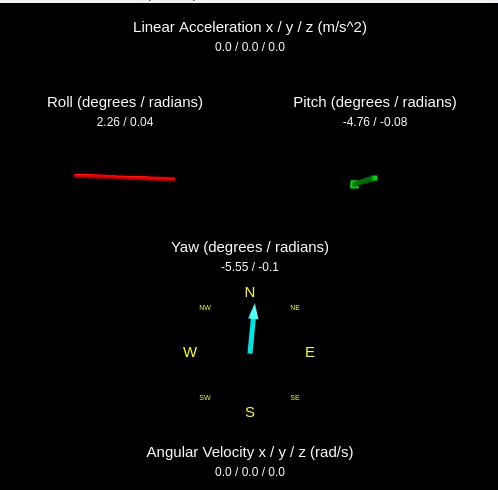
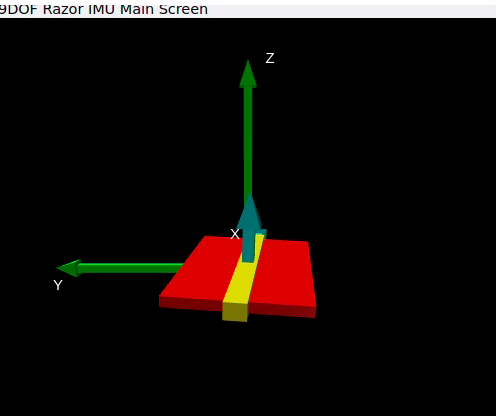
roslaunch razor_imu_9dof razor-display.launch
- 效果图1:
- 效果图2:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号