



















walking机器人仿真教程-应用-单点目标点实现对象跟随
walking机器人仿真教程-应用-单点目标点实现对象跟随
说明:
- 介绍如何利用单点目标点实现对象跟随
相关设备:
- walking机器人套件:采购地址
步骤:
- 加载gazebo环境
. /usr/share/gazebo/setup.bash
- 启动仿真
ros2 launch walking_application hospital_world_object_following.launch.py
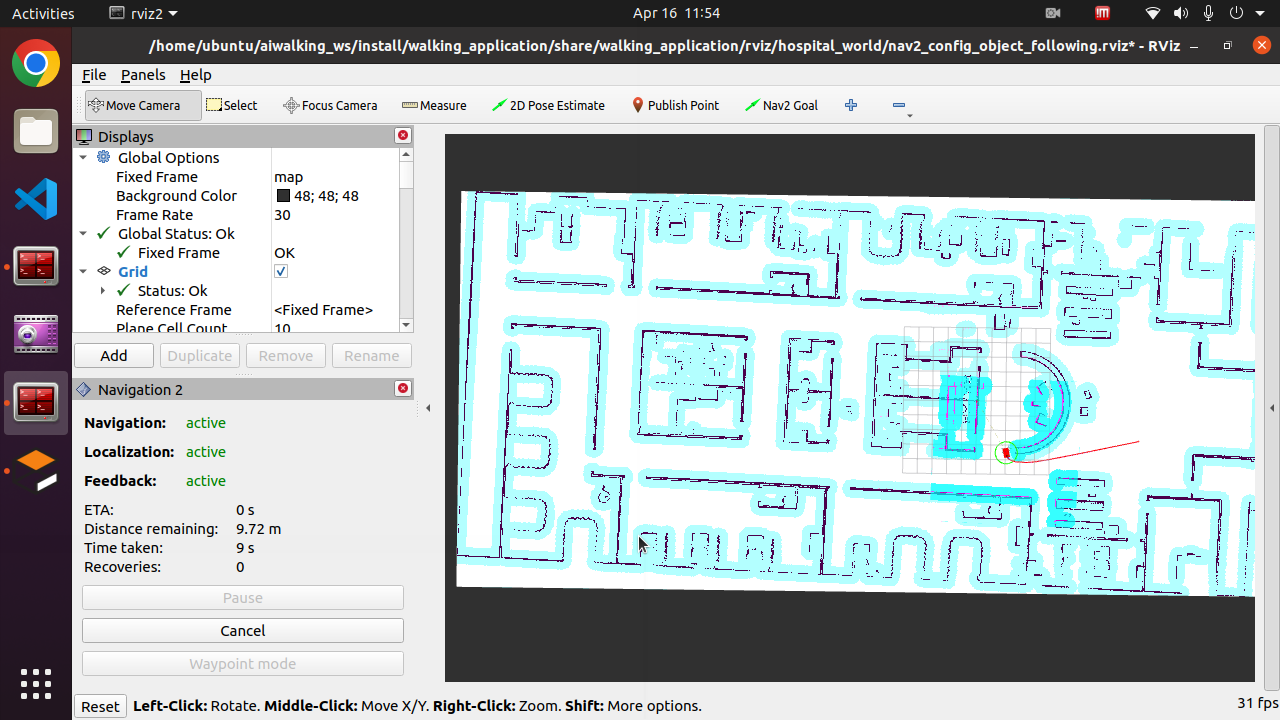
- 效果图:

- 发布跟随的目标点
ros2 topic pub -1 /goal_pose geometry_msgs/PoseStamped '{ header: {stamp: {sec: 0, nanosec: 0}, frame_id: "map"}, pose: {position: {x: 5.0, y: 0.0, z: 0.25}, orientation: {w: 1.0}}} '
- 或通过在rviz上选择目标, 小车实时跟踪目标实现跟随.
- 可以通过其他方式实时发布目标点,从而实现快速跟随
- 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号