



















walking机器人仿真教程-应用-障碍检测
walking机器人仿真教程-应用-障碍检测
说明:
- 介绍如何进行障碍检测
相关设备:
- walking机器人套件:采购地址
步骤:
- 新终端,启动仿真
ros2 launch walking_gazebo world.launch.py world_model:=follow.sdf
- 效果图:

- 新终端,启动检测
ros2 launch walking_example obstacle_detection.launch.xml
- 新终端,发布行走速度
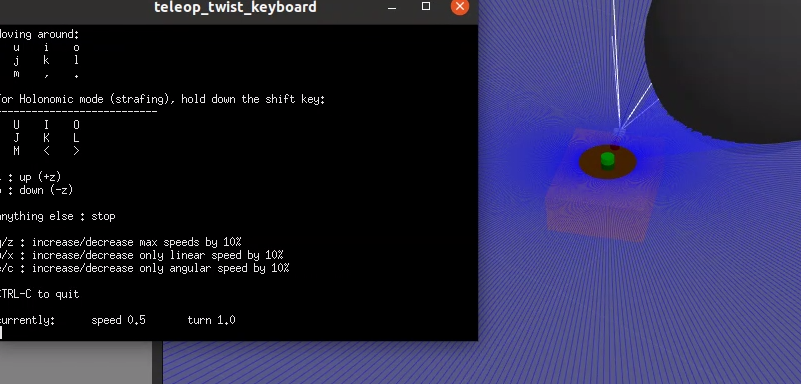
ros2 launch walking_teleop keyboard_raw.launch.py
- 效果图:

- 按j控制小车旋转面向圆球, 按k停止, 按i往圆球方向前进, 小车在离圆球接近0.5m的位置前停止
- 效果图:
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号